

 Note Taking
Note Taking
Lecture 4 요약
•
Computational Graph
◦
단일 computation 을 단일 node 로 표현
◦
각 요소의 변화에 따른 loss 의 변화(gradient) 계산하기에 용이
•
Back Propagation
◦
Upstream gradient + local gradient + chain rule 를 활용한 downstream gradient 의 계산
◦
재귀적으로 모든 요소에 대한 gradient 를 찾아낼 수 있음
◦
Vectorized 된 computation 의 경우 jacobian matrix 를 사용
•
Neural Networks
◦
Linear Score Function 이 Stack 된 형태
◦
Linear Score Function 사이에 non-linearity 존재
아래 두 항목은 알면 좋으나 중요하지 않다고 느껴진 부분들 !! 가볍게만 보자...!
Convolutional Neural Network 발전의 큰 개관
Convolutional Neural Nework 의 구성에 영향을 준 연구와 그 역사?
Convolutional Neural Network 가 활용되는 장소?
•
Image Classification
•
Image Retrieval (similarity matching)
•
Object Detection
•
Image Segmentation
•
Face Recognition
•
Pose Estimation
•
Image Captioning (Image to text description)
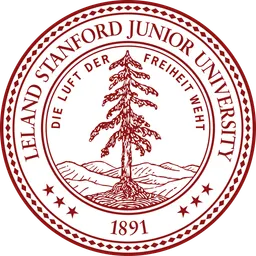
Fully Connected Layer
•
Input 은 1 dimensional vector ()
◦
만약 Input 전 단계에서 3 dimensional vector 가 산출 되었다면 1 dimensional vector 로 flatten 하는 과정이 필요
•
Weight 는 2 dimensional vector ()
•
Output 은 1 dimensional vector - activation ()
•
연산 자체는 matrix multiplication 과 동일
◦
•
Convolutional Neural Network 의 끝에 와 이때까지 구했던 vector 와 모두 연결된 새로운 vector 를 만들어내는 역할 (inference 에 모든 input vector element 가 사용됨)
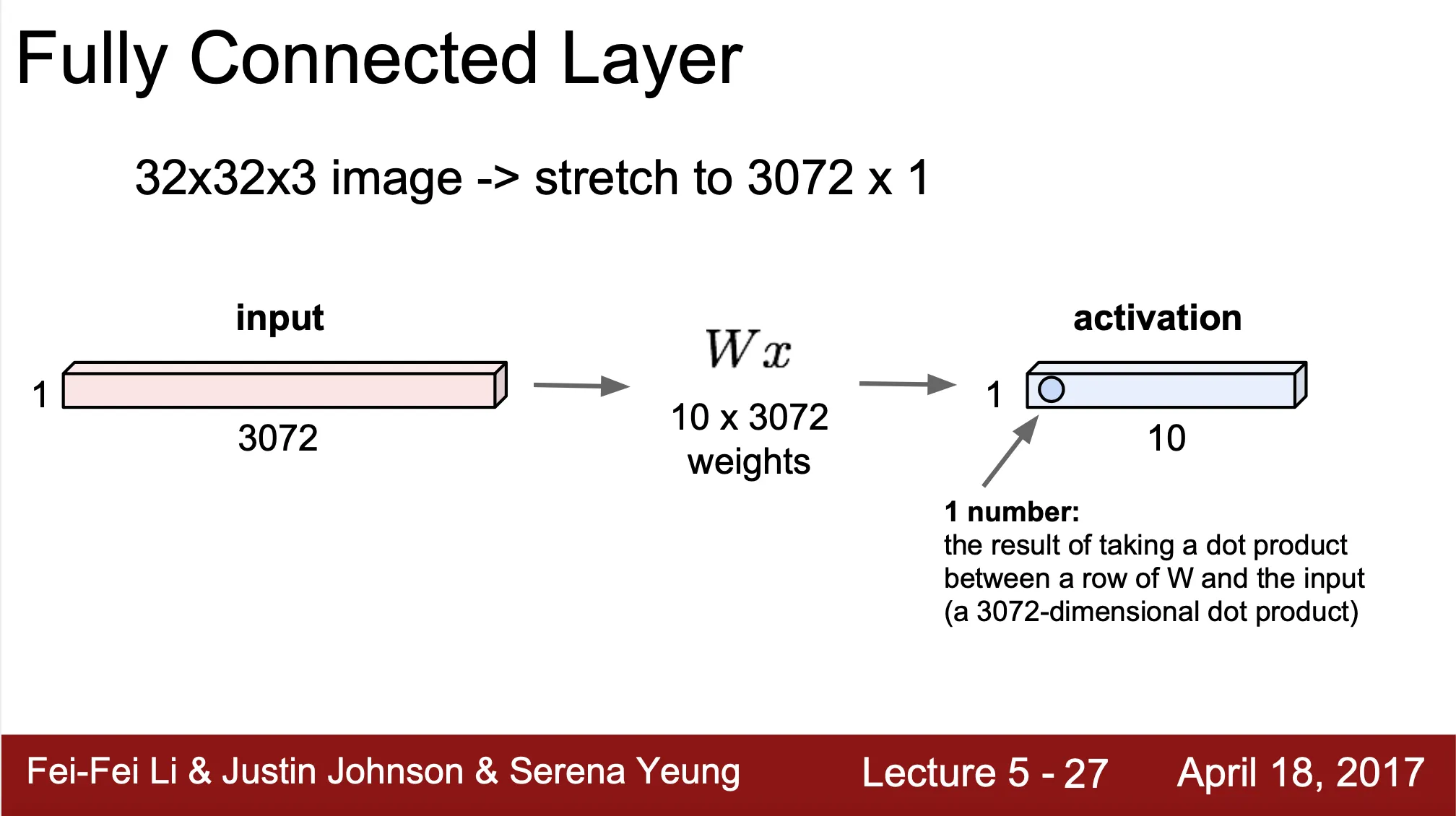
Convolution Layer
•
Fully Connected Layer 와는 다르게 spatial structure 를 유지
•
Image, 혹은 이전 단계의 vector 를 convolving 하는 filter 가 존재
◦
filter = kernel = receptive field 모두 혼용해서 사용하는 단어
◦
filter 는 convolution layer 에서의 weight
•
Filter 가 image 를 convolve 하면서 spatial region 만큼을 dot product 한 값을 산출하여 새로운 output vector 를 산출 (이를 위해서는 image 와 filter 의 depth 가 같아야 함)
◦
위 사진의 예시로는, 두 image 가 겹치게 되었을 때 서로 겹치는 부분을 곱해서 나온 값을 서로 다 더해서 새로운 값 하나를 뽑아내는 것임 (Sum of Product)
◦
새로운 값 하나를 뽑아내는 과정을 image 를 convolve 하면서 계속 진행해서 spatial structure 가 유지된 새로운 output vector 를 산출
◦
한 칸씩 이동하며 convolving 할 경우, 의 output vector 가 생성
•
Filter 의 개수만큼 output vector 의 depth 가 증가 (위에 설명한 과정을 filter 의 개수만큼 반복해서 쌓아가는 형태)

•
Convolution 연산?
◦
image 에 padding 이 붙은 새로운 vector 위를 filter 가 stride 만큼씩 이동하며 convolve 하여 output vector 를 산출
◦
stride: filter 가 image 를 convolve 할 때 filter 가 한 번에 이동하는 pixel 수
◦
padding: image 의 가장자리에 붙는 zero-padding 의 두께 pixel 수
◦
만큼의 padding 을 가지는 image 위를 filter 가 만큼의 stride 를 가진채 convolve 할 경우 output vector 의 spatial dimension 은?
▪
▪
example 1) Output Dimension?
1. Input dimension:
2. filters
3. stride 1
4. padding 2
→
→
▪
example 2) Parameter Number?
1. Input dimension:
2. filters
3. stride 1
4. padding 2
→
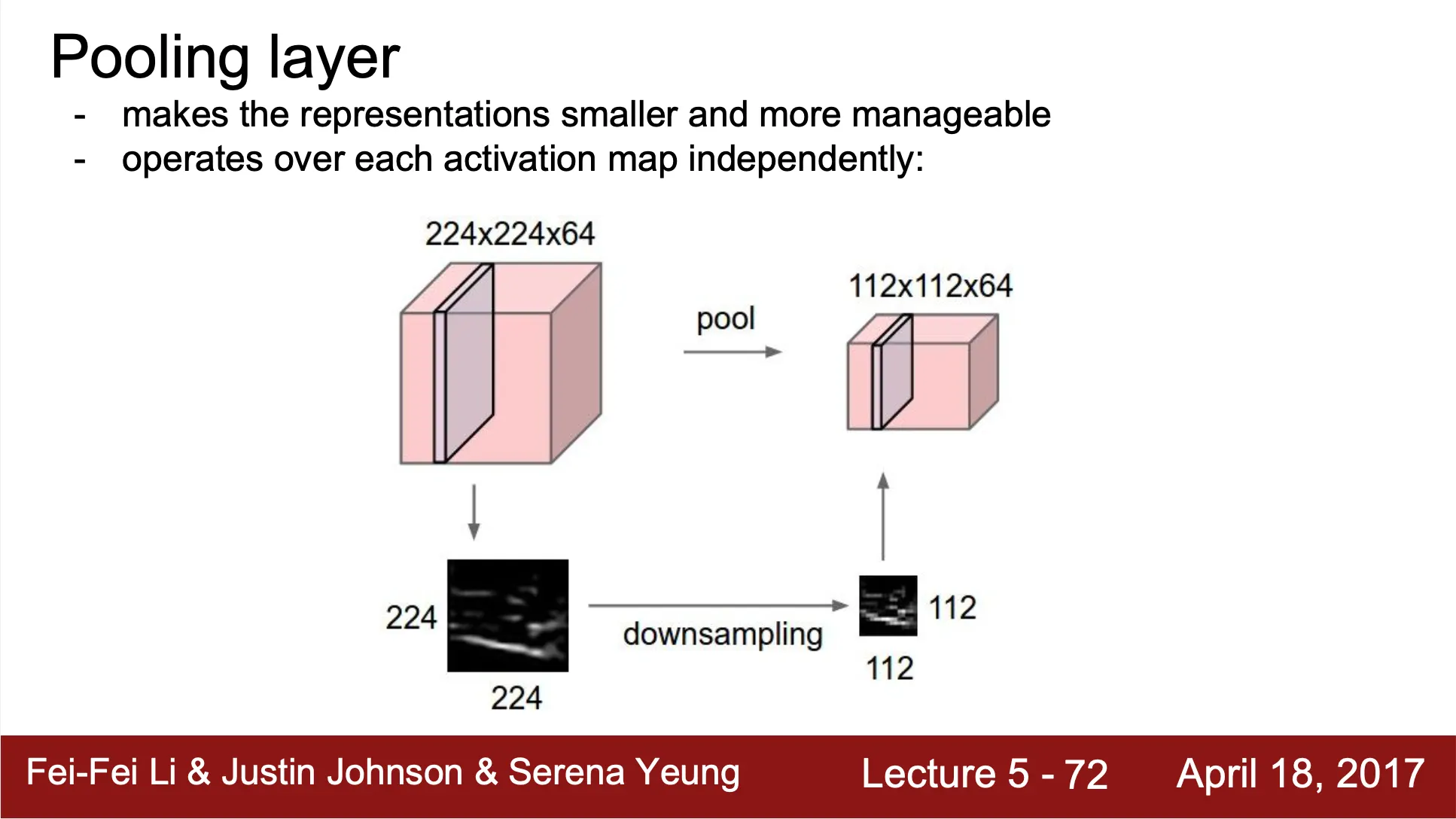
Pooling Layer
•
Representation 을 더 작은 dimension 으로 변환하는 역할 (downsampling)
•
오로지 spatial dimension 만을 downsample
•
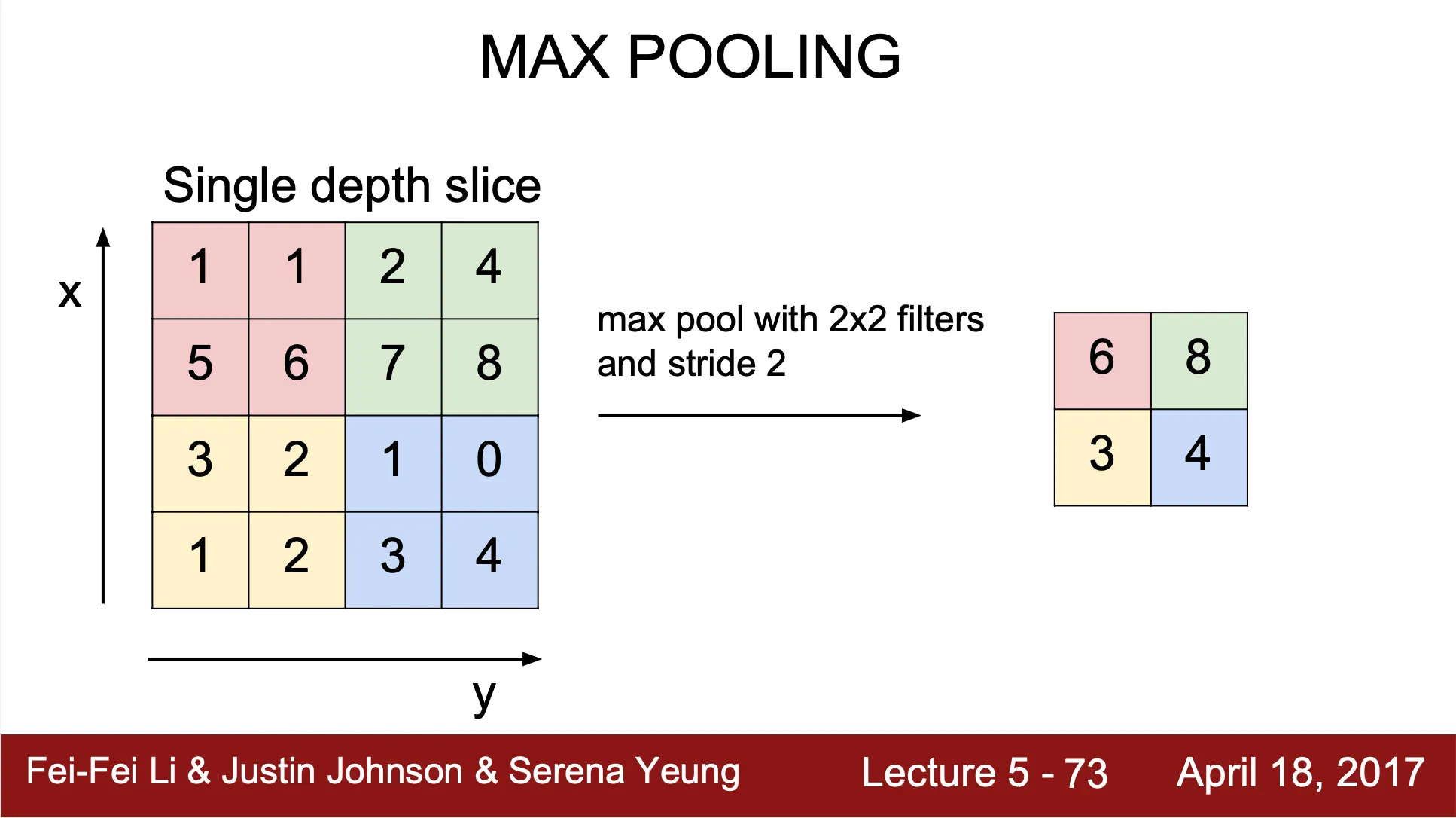
Max Pooling 연산?
◦
filter size 내에서 가장 큰 값을 산출하여 대표 값으로 설정
◦
Convolution Layer 처럼 filter 가 stride 만큼 움직이며 output value 를 산출하면서 reduced 된 형태의 spatial structure 를 만들어냄
◦
Convolution Layer 와 다르게 padding 이 존재하지 않음
•
input image 를 의 filter 가 stride 를 가지면서 pooling 하여 가 산출되었을 때,
를 가짐. Convolution Layer 와 동일하지만, padding 만 존재하지 않음.
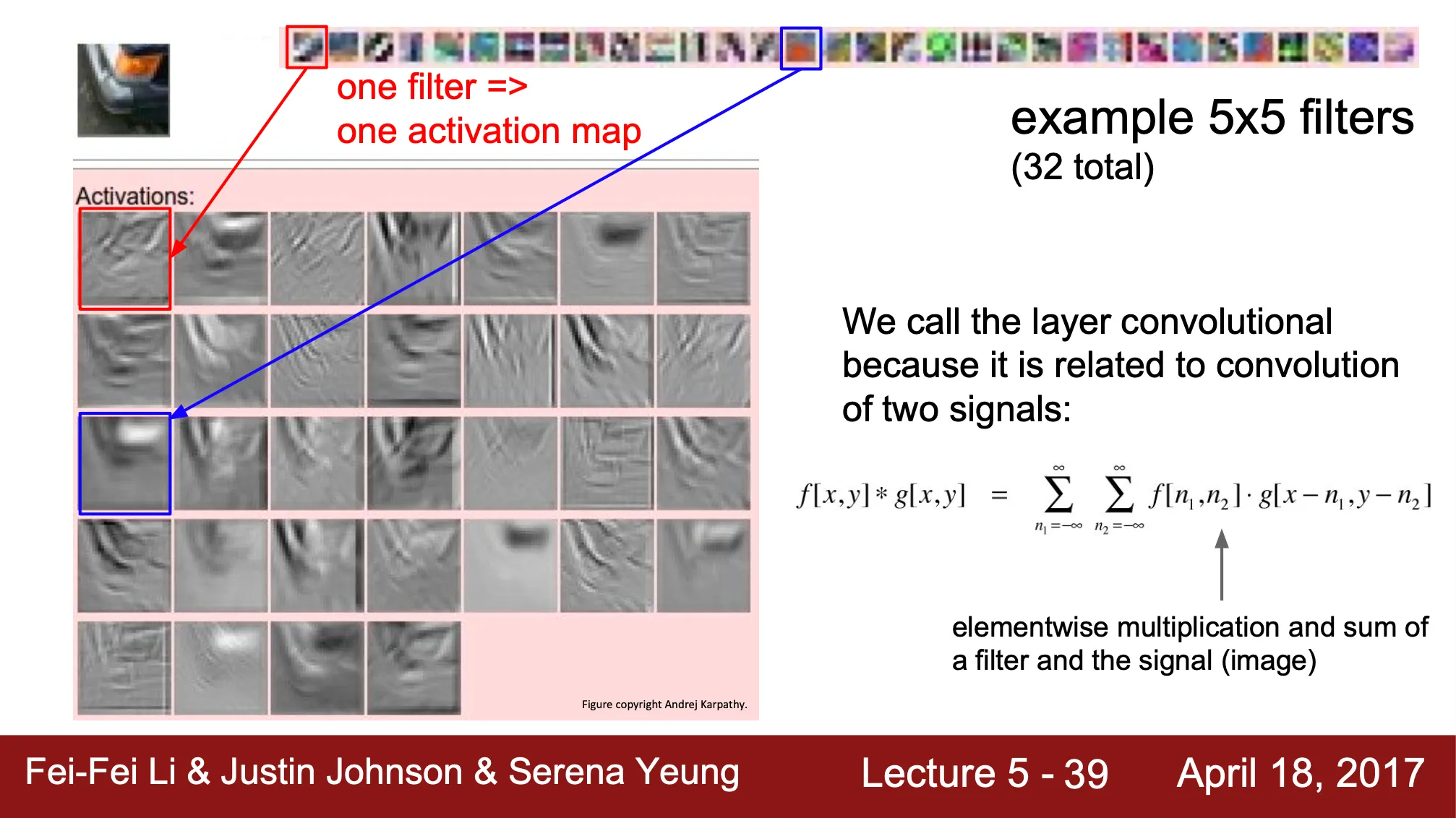
Convolutional Neural Network 의 heirarchy
•
Convolutional Layer + ReLU 가 층층히 쌓여 있고, 마지막에 Fully Connected Layer + SoftMax
•
각 층마다 나타나는 feature 의 형태가 다름
◦
Low-level: Low-level features, edges
◦
Middle-level: Middle-level features, corner & blobs
◦
High-level: High-level features, resembled blobs
•
각 filter 가 관찰하는 이미지의 특성이 다르고, 이것이 actiavation map 에 드러남
◦
각 filter 의 형태 (template) 이 이미지에서 어떻게 나타나는가가 dot product 결과인 activation map 에 드러남
◦
붉은 박스의 filter 의 activation map 은 자동차 전조등의 edge 를 잘 관찰해냄