

 Note Taking
Note Taking
Lecture 5 요약
•
Fully-Connected Layer
◦
연산 자체는 Matrix Multiplication 과 동일
◦
1 dimension vector input ()
◦
1 dimension vector output ()
◦
2 dimension vector weight ()
◦
Convolutional Neural Network 에서 마지막에 최종 output 을 산출하기 전에 모든 feature 와 연결된 새로운 vector 를 만들기 위한 layer
•
Convolution Layer
◦
Image, 혹은 2(or 3 with depth) dimension vector 의 spatial dimension 을 유지하는 연산
◦
Input vector ()
◦
Input 을 convolving 하는 filter (== kernel == receptive field) 정의 ()
◦
Filter 가 input vector 를 convlove 하며 dot product 연산을 하고, input vector 와 spatial dimension 이 같은(혹은 size 가 변하긴 하지만 형태 유지) output vector 를 출력해냄
◦
Filter 의 개수
◦
Filter 가 convolving 하는 간격 stride
◦
Input 의 가장자리에 붙는 padding
◦
Output vector ()
◦
Image 내에서 지역적인 특성을 추출해 내기 위한 layer
•
Pooling Layer
◦
Image, 혹은 2(or 3 with depth) dimension vector 의 spatial dimension 만을 줄이는 연산
◦
Convolution Layer 에서 padding, filter 개수 개념만 제외
◦
Output vector depth 는 Input vector depth 와 동일
◦
Filter 가 input vector 를 convolve 하며 특정한 연산(ex. max) 을 통해 대표 값 하나를 산출하여 input vector 에서 size 가 줄어든 output vector 를 출력해냄
◦
Output vector()
Mini-batch SGD
•
Training data 중 일부를 batch 로 묶어 sampling
•
Network 를 통해 forward propagation
•
Back Propagation 을 통해 weight-wise gradient 계산
•
Gradient 를 사용해 weight update
Activation Functions
•
Input vector 와 Weight 와의 연산 이후에 non-linearity 를 부여
•
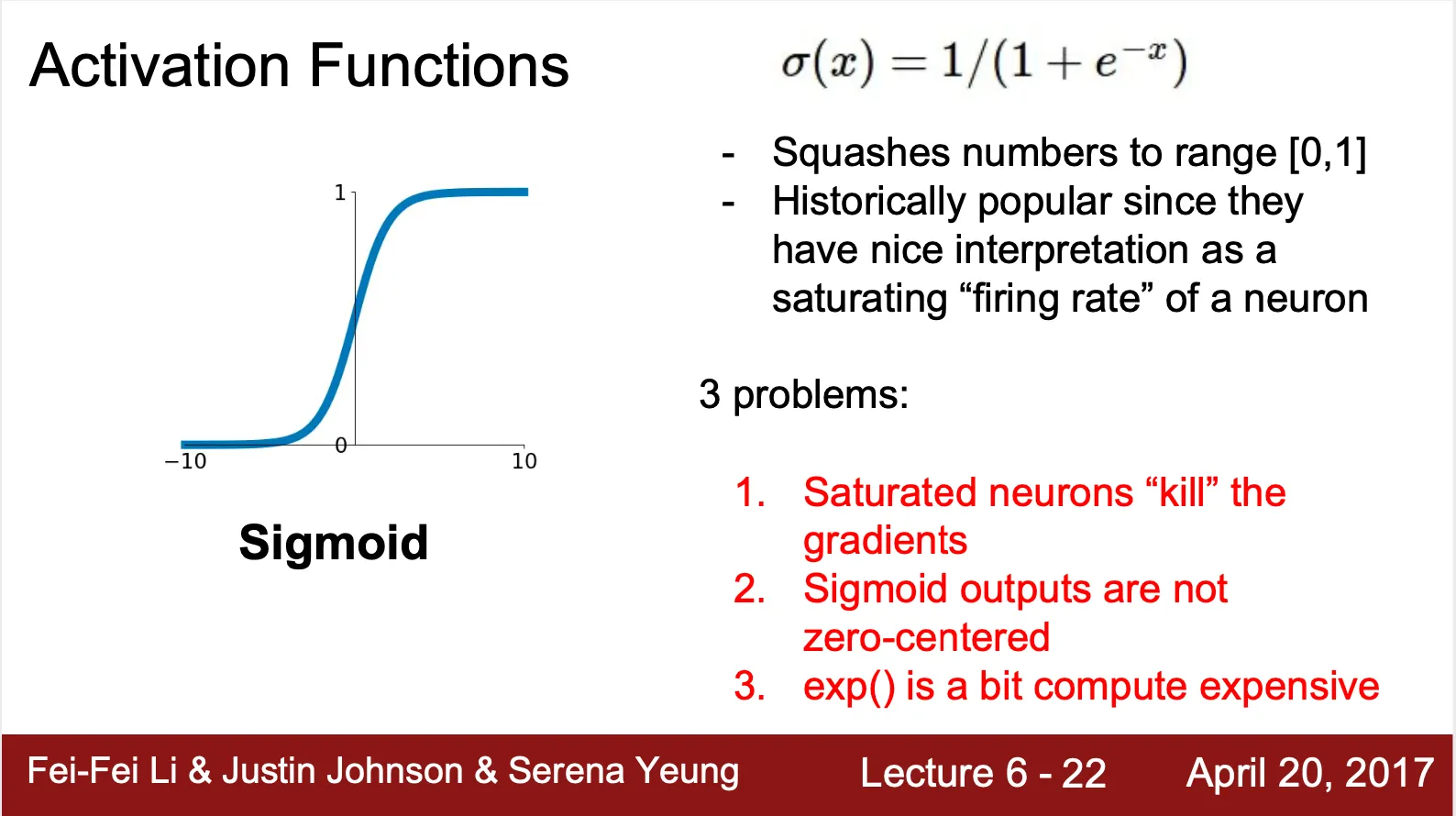
Sigmoid ?
◦
일정 수준 이상이 되면 자극이 전달되는, 생물학적 neuron 의 "firing rate" 를 잘 묘사했다는 전통적인 평가를 받으며 자주 사용되던 activation function
◦
모든 값을 사이로 mapping
◦
•
세 가지 문제점이 존재
◦
Saturated 된 neuron 은 gradient 를 더 이상 전달하지 않음
▪
Downstream gradient 는 Upstream gradient 와 local gradient 의 곱 연산(Chain Rule)
▪
Local gradient 가 0 에 가까이 수렴하기 때문에 downstream gradient 가 사라짐
◦
Exponential 이 꽤나 비싼 연산임 (Convolution 이 더 비싸서 딱히 유의미하진 않음)
◦
Zero-Centered 되어 있지 않음
▪
Input X 의 모든 요소가 양수라면?
•
Local gradient 는 x 의 각 요소이기 때문에 무조건 양수
•
Downstream gradient 의 경우에는 요소에 상관 없이 무조건 양수 혹은 무조건 음수 (Upstream gradient 가 양수면 양수로, 음수면 음수로 결정)
•
Gradient update 의 방향성이 제한되어 버림 + 수렴 속도도 느려짐

•
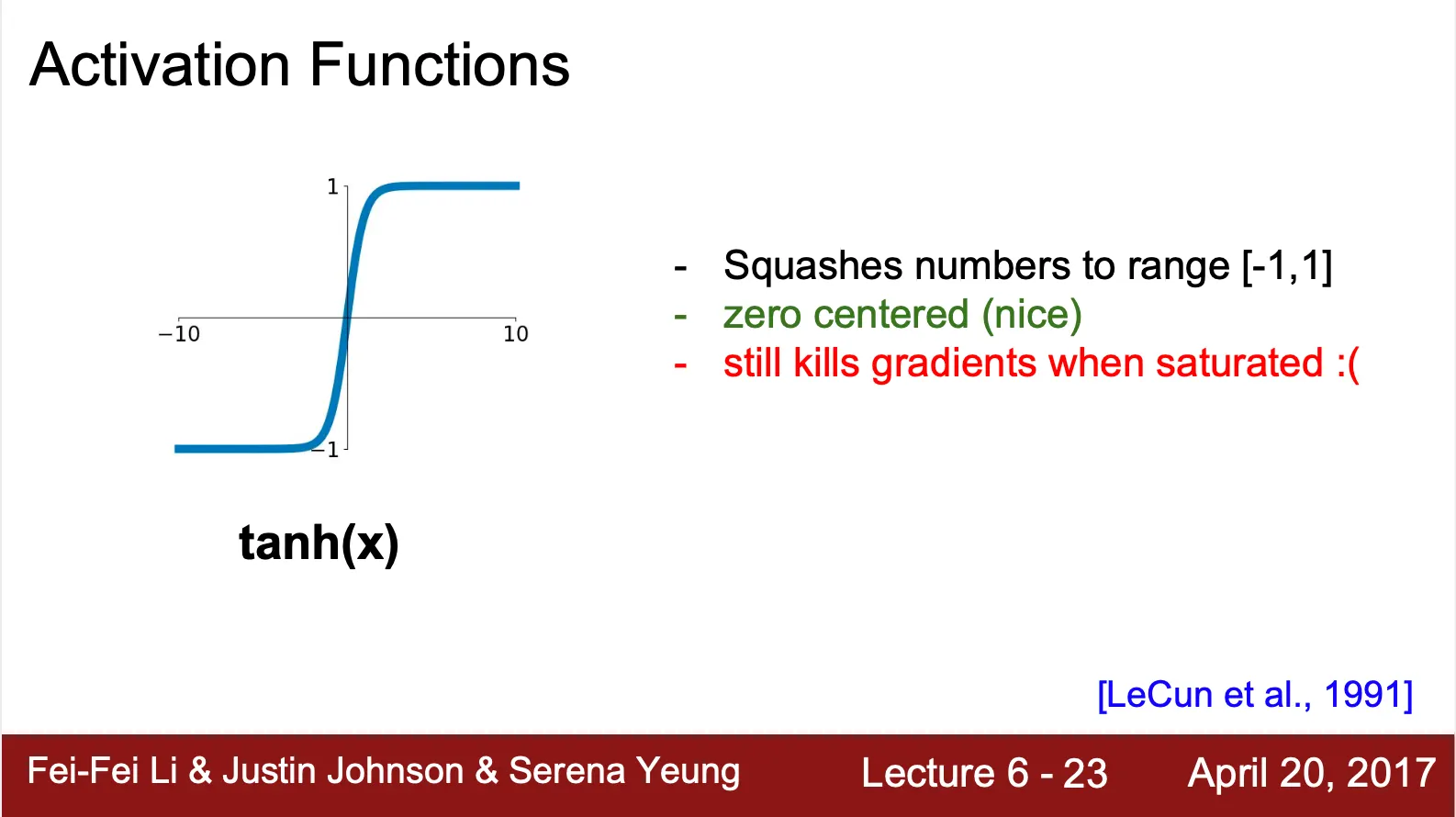
tanh (Hyper Tangent)?
◦
Sigmoid 에서 나타난 Not Zero-Centered 문제를 해결한 활성화 함수
◦
모든 값을 사이로 mapping
◦
여전히 saturation 시 gradient 를 없애는 문제가 존재
•
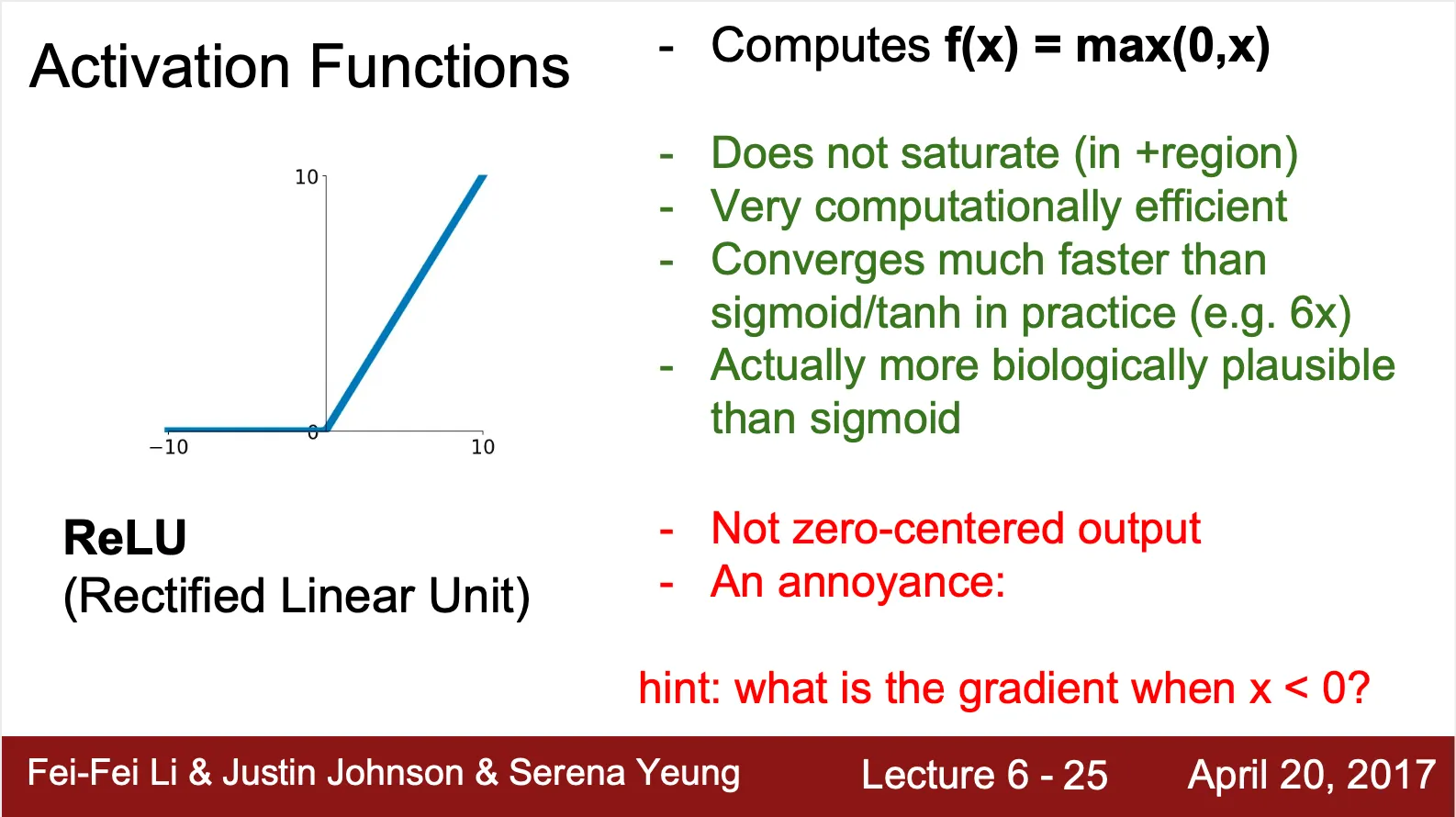
ReLU (Rectified Linear Unit) ?
◦
Sigmoid 의 단점을 보완하면서도 생물학적으로 더 좋은 근사함수로 제시된 활성화 함수
◦
◦
Sigmoid 의 saturation 문제를 해결 (positive region 에 대해)
◦
Negative region 에 대해서는 여전히 saturated (dead ReLU)
▪
Negative region 에 대해서 0 을 산출하여 neuron 의 활성도가 0 이 된 이후 network 에 영향을 줄 수 없음
▪
이후 network 에 대한 영향이 없기 때문에 upstream gradient 가 0 이 됨
▪
Upstream gradient 가 0 이기 때문에 downstream gradient 도 0 이 되고 weight update 가 일어나지 않음 (dead ReLU)
◦
여전히 Not Zero-Centered
•
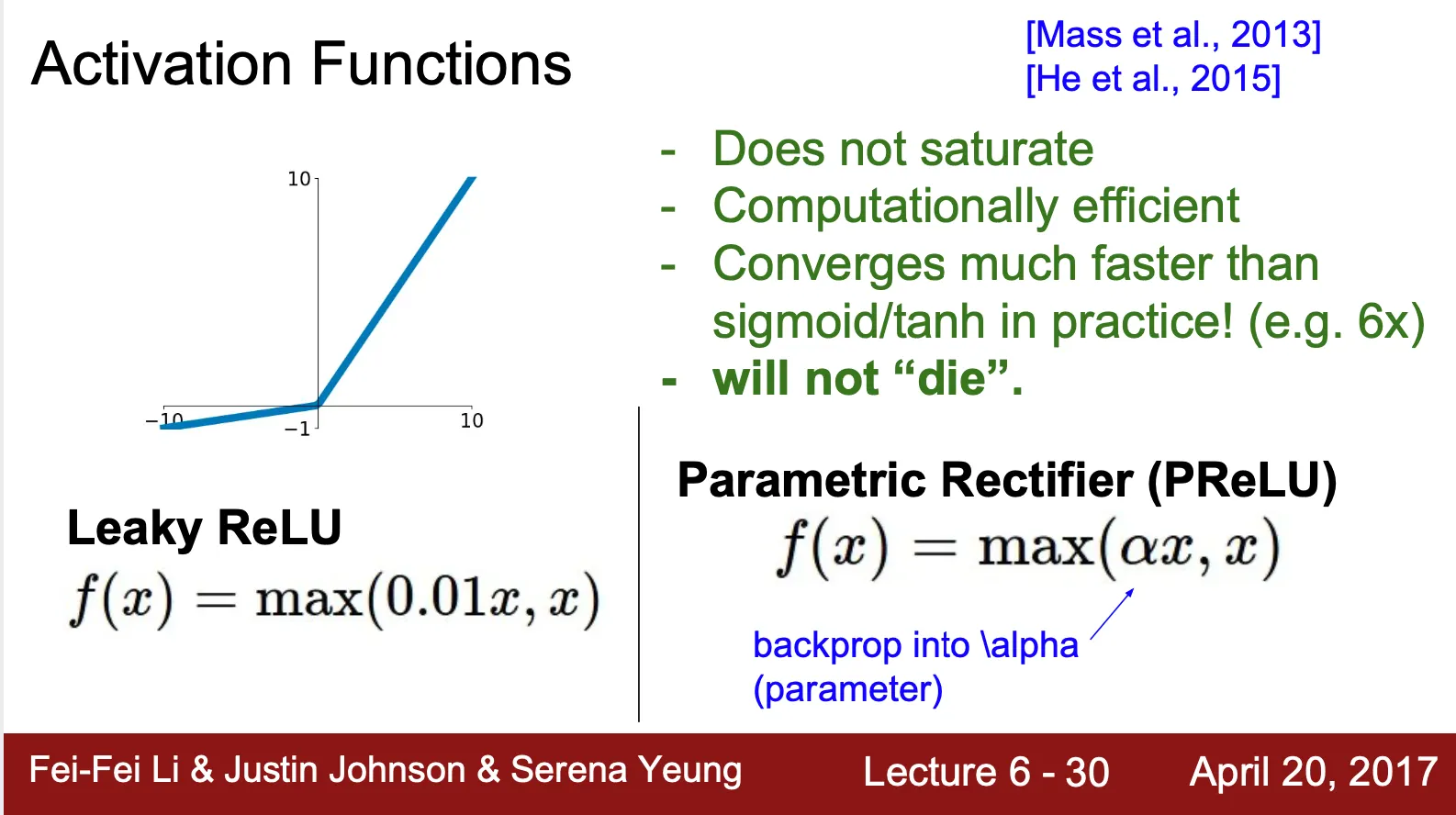
Leaky ReLU & Parametric ReLU?
◦
ReLU 에서 나타난 dead ReLU 문제를 해결하기 위해 제시된 활성화 함수
◦
◦
, 는 constant
◦
Saturation 문제를 all region 에 대해서 해결
◦
Zero-Centered (음수를 산출하는 영역 존재)
•
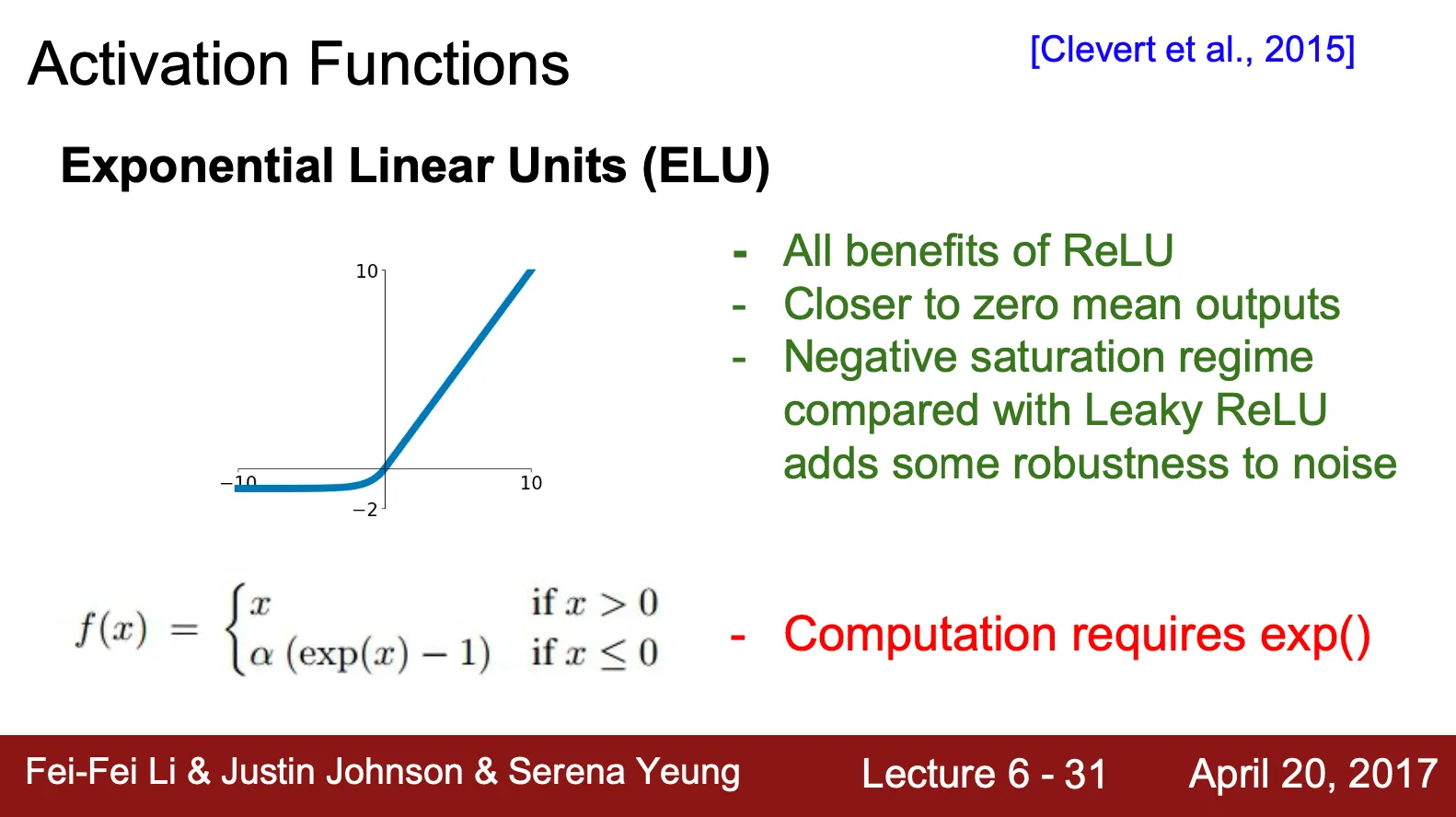
ELU (Exponential Linear Unit) ?
◦
ReLU 의 변종 중 하나
◦
◦
ReLU 의 장점들을 모두 가지고 있음
◦
Leaky ReLU 나 Parametric ReLU 랑은 달리 negative region 에서 saturation 을 보임
▪
단점일 수 있으나, noise 에 robust 하다는 장점을 가짐
◦
ReLU 와 Leaky ReLU 의 중간형으로 볼 수 있음
▪
ReLU 보다는 Zero-Centered
▪
Leaky ReLU 보다는 Saturated
•
Maxout ?
◦
Activation Function 이라기 보단 Non-Linearity 를 부여할 수 있는 Layer
◦
◦
ReLU 에서는 0 과 한 weight 연산 결과() 사이를 를 했다면, 여기는 두 weight 연산 결과 사이를 연산을 취함
Data Preprocessing
•
앞서 언급했던, 데이터가 Not Zero-Centered 시 나타나는 문제점(specific direction update) 해결
•
Standard Data Preprocessing
◦
Zero-Mean
◦
Normalization
•
Machine Learning Preprocessing
◦
PCA (데이터를 표현하는 vector space 의 주성분을 추출하여 새롭게 데이터를 표현)
◦
Whitening (모든 variable 을 uncorrelated 하게 바꾸며 variance 를 1로 만드는 과정)
Weight Initialization
•
네트워크 학습 시의 초기 weight 를 initialize 하는 방법론
•
Zero Initialization
◦
◦
모든 값을 0 으로 초기화
◦
일반적인 네트워크에서 각 neuron 의 연결 관계가 symmetric 하기 때문에 동일한 양상으로 update 가 진행되어 좋지 않음
◦
bias 나 non-linearity 때문에 neuron 의 update 가 안 일어나지는 않음
•
Small Standard Normal Initialization
◦
◦
작은 네트워크에서는 괜찮으나, 큰 네트워크에서 activation 이 0 으로 수렴하게 됨
▪
값이 작아지고 를 거치면서 0 에 가까워지는 구조
▪
각 layer 의 activation 의 standard deviation 이 점점 감소해 0 이 되어버림
▪
설상가상으로, activation 이 0 에 가까워지면 앞서 살펴본 것처럼 update 도 일어나지 않게 됨
•
Big Standard Normal Initialization
◦
◦
모든 neuron 이 saturated 됨
▪
값이 커지고 를 거치면서 양 극단에 가까워지는 구조
▪
각 layer 의 activation 이 -1 또는 1 이 되어버림
▪
Saturation 문제 때문에 update 가 일어나지 않게 됨
•
Xavier Initialization
◦
위 두 경우의 normal initialization 에서 나타난 문제를 해결하기 위해 제시된 초기화 방법
◦
(논문과의 식이 다른데, 강의에서 약식으로 가져온 듯 함)
◦
이 커지면, 전체적인 값이 커질 것을 생각하여 weight 를 작게 하려하고, 이 작아지면, 전체적인 값이 작아질 것을 생각하여 weight 를 크게 하려함
◦
요점은, 값이 너무 작지도, 너무 크지도 않게 나오게 하는 것
◦
Activation 의 분포가 layer 를 지나도 normal distribution 을 유지하려고 함
◦
ReLU 를 사용할 경우 반 정도의 activation 을 0 으로 만들어버리기 때문에 전체적으로 가 작아지는 경향성을 더 많이 가졌음
•
He Initialization
◦
Xavier Initialization 에서 ReLU 를 사용할 경우 나타났던 문제를 해결하기 위해 제시된 초기화 방법
◦
(논문과의 식이 다른데, 강의에서 약식으로 가져온 듯 함)
◦
반 정도의 neuron 이 0 으로 산출된다는 점에 착안하여 의 크기를 일부 늘려줌 (0 이 되는 neuron 의 수의 감소)
Batch Normalization
•
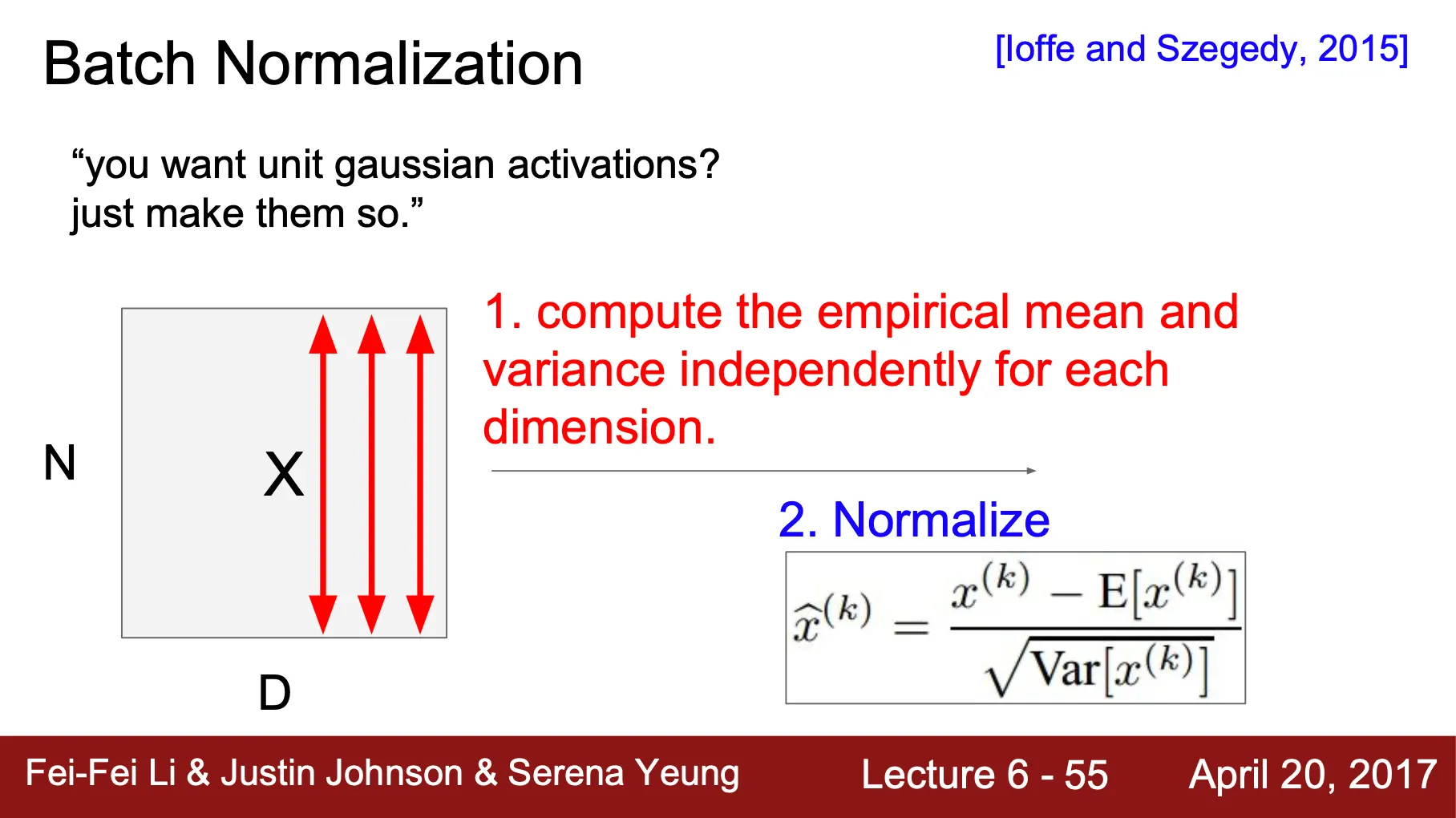
앞에서 Activation 의 분포가 layer 를 지나도 normal distribution 이 유지되기를 원함 (Update 중간에 distribution 이 보통 0, -1, 1 등의 값으로 수렴하여 제대로 된 update 가 일어나지 않았기 때문)
•
"Activation 이 normal distribution 이 되기를 원한다면, 매번 그렇게 바꾸어주면 되잖아 ?"
•
Batch 에 속하는 vector 들 사이의 mean 과 variance 를 training time 에 계산하여 normalize
•
보통, Batch Normalization Layer 는 Fully Connected Layer 와 Convolution Layer 이후에 옴
•
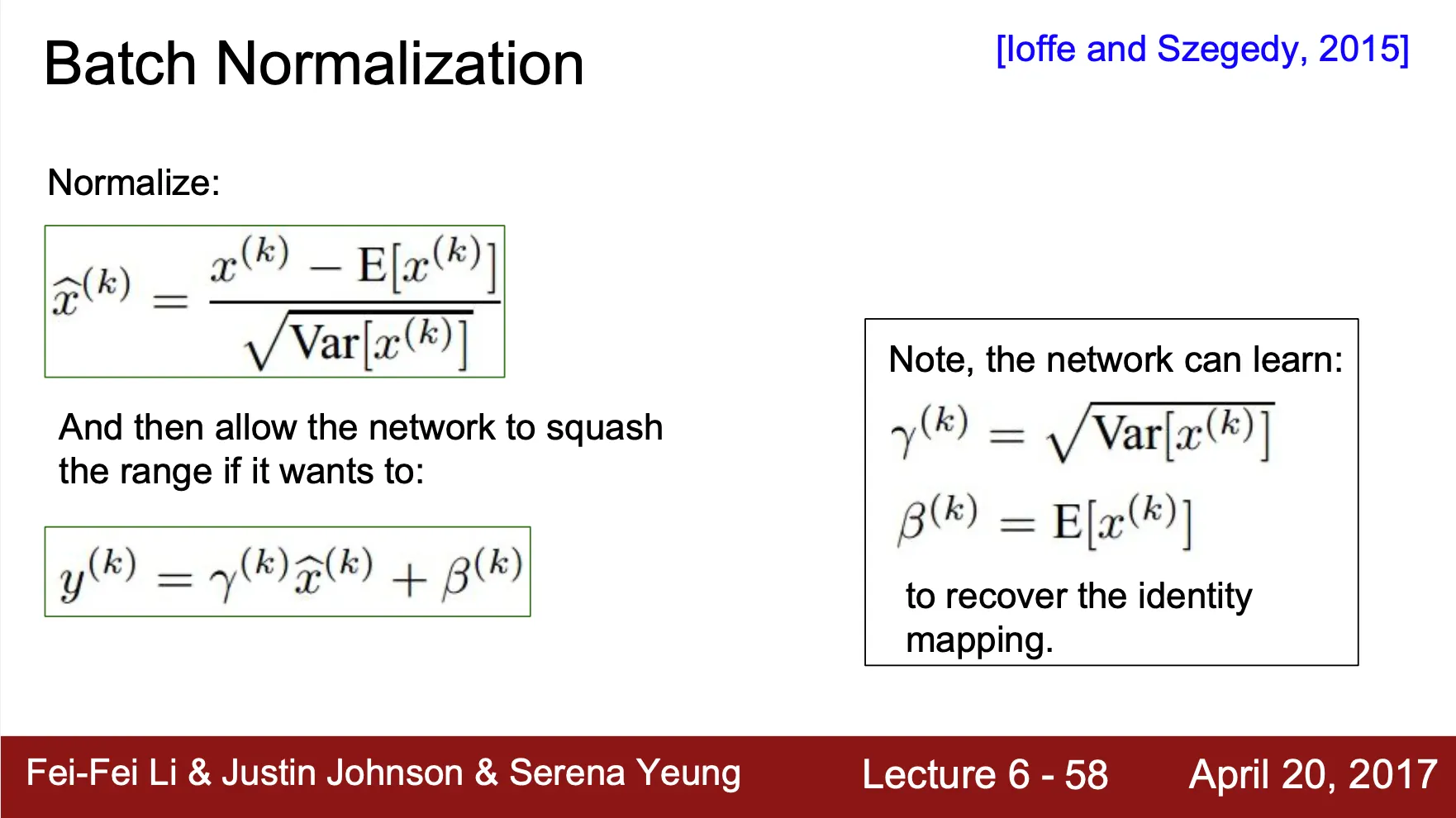
Normal distribution 으로의 data 를 강제하는 것이 항상 좋다는 확신이 없기 때문에 parameter 를 도입하여 flexibility 를 부여
◦
for scaling
◦
for shifting
Babysitting the Learning Process
•
Preprocess the data
•
Choose the architecture
•
Double check that the loss is reasonable
◦
첫 시작 시 loss 가 합리적인 수치인지 검증 (softmax 일 경우, cross entropy 를 쓸 것이므로 )
◦
Regularization 을 추가했을 때 regualriazation loss 가 추가되는 것을 확인
◦
적은 dataset 으로 먼저 학습을 진행해보고 overfitting 을 할 수 있는지 확인 (loss 가 zero-toward 될 수 있는지)
◦
Regularization 을 작게 유지한 채 좋은 learning rate 를 rough 하게 찾음
▪
큰 learning rate 를 사용하면, loss 가 Not a Number 가 등장할 수 있음 (loss exploding)
▪
Loss 는 비슷해도 accuracy 가 좋아지는 경우는 어떻게 설명할까?
•
Loss 의 각 요소 (softmax 시 각 class 에 해당하는 값들) 이 shifting 되면서 top-1 class probability 가 ground-truth 인 경우가 많아진 것임
Hyperparameter Optimization
•
좋은 hyperparameter 를 어떻게 얻을까 ?
◦
Coarse → Fine Cross-Validation
▪
짧은 학습으로 대략적인 좋은 hyperparameter 의 범위를 찾음 (Coarse Serach)
▪
긴 학습으로 좋은 hyperparameter 를 정확하게 찾음 (Fine Search)
▪
Original loss 의 3 배 이상 loss 가 커지는 현상을 목격한다면 Loss Explosion 으로 봐도 됨
▪
Fine Search 에서 best case 가 범위의 끝 부분에 나타난다면, 범위를 늘려서 확인해보는 것이 좋음 (실제로 optimal case 가 아닐 가능성이 있기 때문)
•
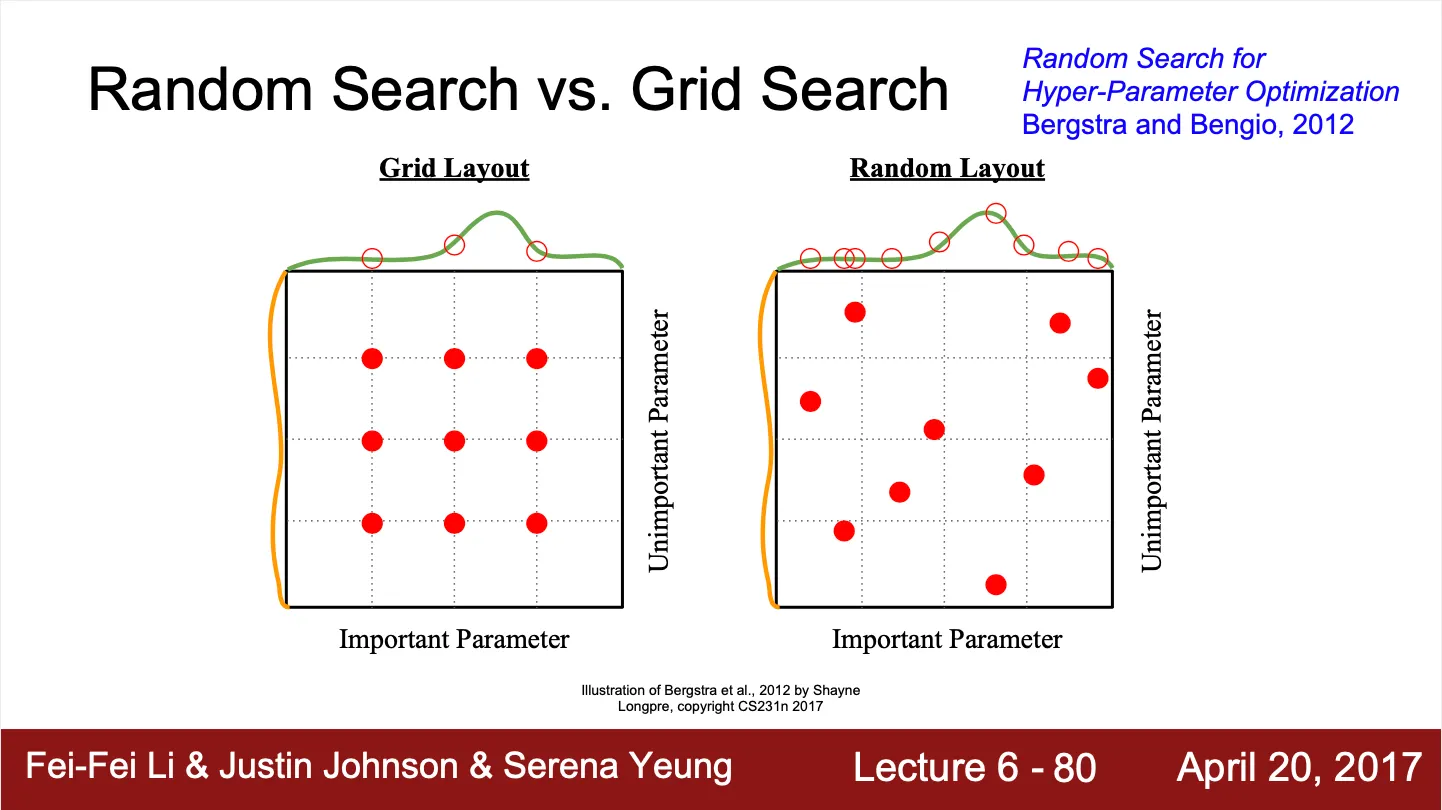
Random Search VS Grid Search
◦
Random Search 는 주어진 범위 안을 random 하게 실행해보는 것
◦
Grid Search 는 주어진 범위 안을 일정한 가격으로 실행해보는 것
◦
보통의 경우, Random Search 가 조금 더 일반성을 대변할 수 있음
•
Loss Curve Monitoring
◦
Loss curve 를 모니터링 함으로서 학습이 잘 진행되는지 확인할 수 있음
◦
매우 큰 learning rate 는 loss explosion 을 야기
◦
큰 learning rate 는 빠른 loss 의 감소를 가져오지만, 수렴 지점이나 수렴성 측면에서 좋지 못함
◦
작은 learning rate 는 느린 loss 의 감소를 가져오지만, 수렴성 측면에서는 좋음
◦
좋은 learning rate 는 빠르면서도, 좋은 수렴성을 가지는 수치
◦
만약 처음 loss 가 처음 일정한 구간을 보이고 낮아지기 시작한다면, bad initialization 을 의심해 볼 수 있음

•
Training Accuracy VS Test Accuracy
◦
Gap 이 크다면 overfitting 을 의심해 볼 수 있음. 네트워크의 복잡도를 줄이거나, regularization 을 추가해보는 형태로 가야함
◦
Gap 이 작다면 오히려 네트워크의 복잡도를 늘려서 정확도를 높일 수 있는지 봐야함
•
Weight 와 Weight Update ratio ?
◦
보통 0.001 정도가 되는 것이 좋으나, 상황에 따라 다름
◦
꾸준히 모니터링하여 weight 에 비해 너무 큰, 혹은 너무 변화가 일어나는지를 보면 좋음 → Optimization technique 로 극복할 수 있어보임