



 Note Taking
Note Taking
Lecture 12 요약
•
What's going on inside ConvNets?
◦
First Layer - Oriented Edges & Opposing Color
◦
Last Layer - Activation map 이 nice feature representation
◦
Intermediate Layer
▪
일반적으로는, 크게 의미를 찾기는 어렵지만, 다양한 시도들이 존재
▪
Maximally Activated Patches
•
특정 Layer 의 activation 을 maximize 하는 patch 를 찾아냄
▪
Occlusion Experiment
•
특정 patch 영역을 제외하여 통과시킨 이미지의 결과가 score 에 얼마나 영향을 주느냐를 기준으로 patch 의 중요도를 찾아냄
▪
Sailency Map
•
Score 의 Input pixel 에 대한 gradient 로, 각 픽셀의 score 에 대한 중요도를 찾아냄
•
Gradient Ascent
◦
Last Layer 의 score, 혹은 Intermediate Layer 의 activation 을 maximize 하는 input 의 형태를 학습을 통해서 갱신해나가는 방법론
◦
▪
는 이미지가 natural 하게 보이기 위한 regularization term - 일반적으로 L2
•
Feature Inversion
◦
주어진 feature vector 로부터 input image 를 reconstruction 하는 방법론
◦
생성된 이미지의 feature vector 와 주어진 이미지의 feature vector 와의 차이를 최소화하는 형태로 학습이 진행
◦
•
Texture Synthesis
◦
특정 이미지의 texture 를 나타내는 항목인 Gram Matrix 개념 도입
▪
Feature vector 의 spatial dimension 을 없애고, 2-dimension 으로 만든 형태
▪
의 feature vector 를 개의 dimensional vector 로 나눈 뒤 2 개씩 짝지어 outer product 를 하여 생성된 matrix 의 mean 형태
•
Neural Style Transfer
◦
Content Image 의 content 를 가지면서, Style Image 의 style 을 따르는 이미지 generator
◦
Content Image, Style Image 두 장을 input 으로 받아서 Content Loss, Style Loss 를 최소화하는 형태로 학습을 진행하면서 input noise vector 를 갱신
Unsupervised Learning
•
Supervised Learning
◦
where is data and is label
◦
Classification, Object Detection, Semantic Segmentation, Image Captioning
◦
Learn a function to map
•
Unsupervised Learning
◦
Just data
◦
Clustering, Dimensionality Reduction, Feature Learning, Density Estimation
◦
Learn some underlying hidden structure of the data (Holy Grail: VIsual World 를 이해)
Generative Models: Overview
•
Training data , Generated samples
•
가 와 닮아있도록 학습
•
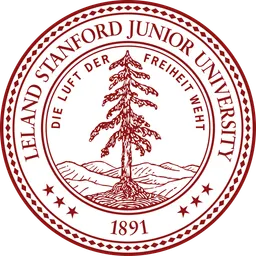
Taxonomy of Generative Models
◦
Explicit densitiy estimation
▪
Explicitly define and solve for
▪
ex) gaussan distribution 을 가정하고 진행
◦
Implicit density estimation
▪
Learn model that can sample from
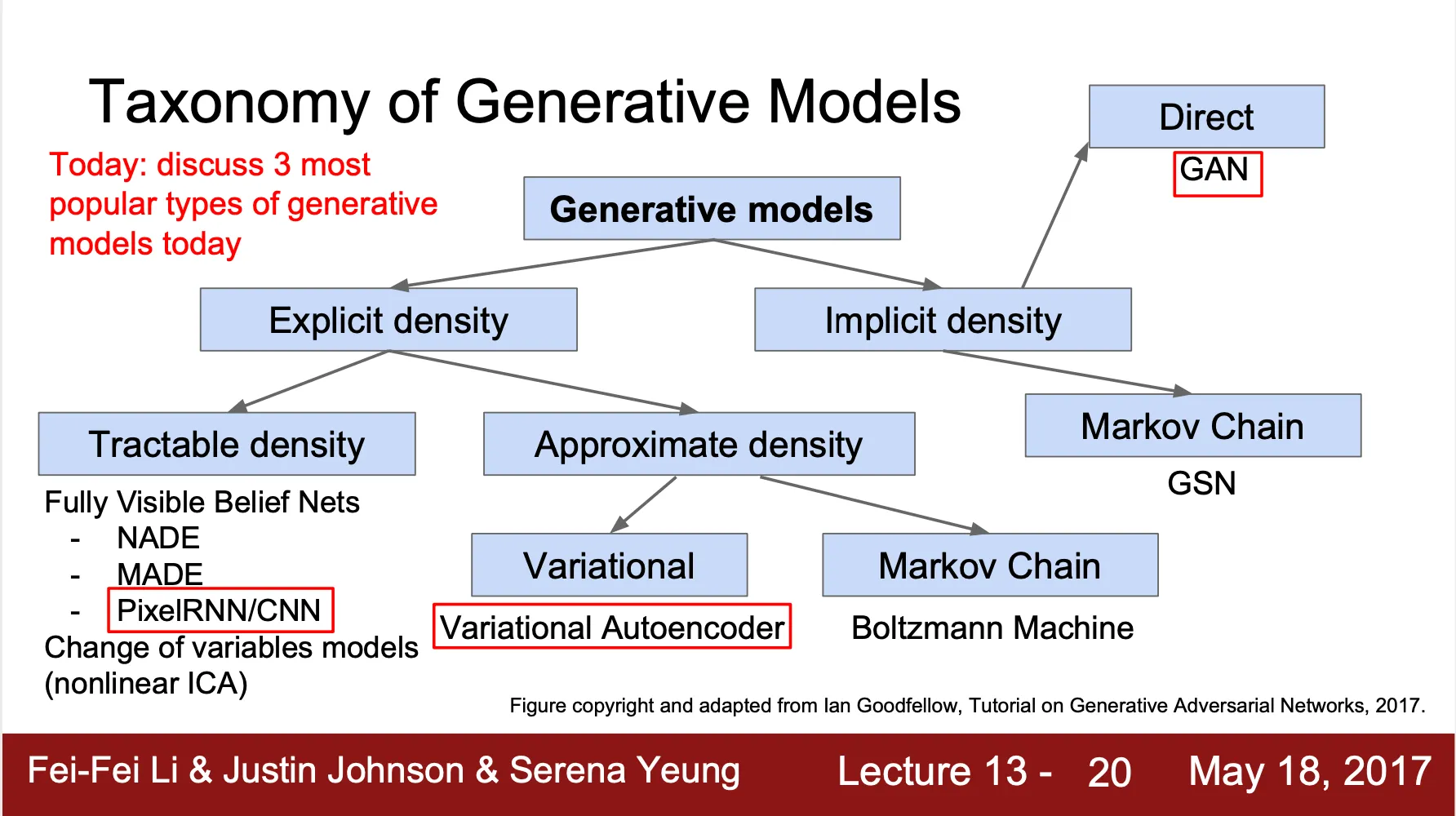
PixelRNN & PixelCNN
•
Image X 의 likelihood
◦
•
PixelRNN
◦
좌 상단부터 시작해서 근접한 pixel 의 값을 RNN (LSTM) 으로 찾아냄
◦
Sequential generation 이라 느림
•
PixelCNN
◦
이전 영역들을 넣어 다음 pixel 값을 뽑아주는 CNN 으로 다음 pixel 을 찾아냄
◦
다음 pixel 의 값은 0~255 사이의 SoftMax ...
◦
Label 이 없고, 본인 데이터만으로 학습하기 때문에 unsupervised learning
•
장점
◦
직접적으로 likelihood 를 계산할 수 있음
◦
training data 로부터 계산된 likelihood 가 좋은 evaluation metric 이 됨
•
단점
◦
Generation 이 sequential 하기 때문에 느림
Variational Auto Encoder (VAE)
•
PixelCNN 은 tractable density function 을 사용했지만, VAE 는 latent vector 에 대한 intractable density function 을 정의
◦
•
Auto Encoder
◦
latent vector : feature representation which dimension is smaller than input
◦
를 학습하기 위해, 로부터 reconstruction 하는 형태로 decoder 형태의 네트워크를 붙임 (좋은 representation 이라면, 재구성이 가능할 정보들을 담고 있어야 함-)
◦
L2 Loss 사용
◦
Training 한 이후, decoder 를 제거하고, extract 한 feature 를 사용해서 supervised model 로 사용함
•
Variational Auto Encoder
◦
Auto Encoder 의 변형으로, 를 prior distribution sample 한 뒤에 를 conditional distribution 로부터 sampling
◦
▪
는 prior distribution 으로 정의 가능
▪
는 네트워크의 output
▪
를 기반한 적분이 계산 불가능!
▪
posterior density 도 분모 항 때문에 intractable
◦
posterior density 를 근사하여 구하는 방법론 사용
▪
를 근사하는 함수 를 정의하고 encoder 네트워크의 output 으로 설정
▪
encoder 는 gaussian distribution 의 mean, variance 를 학습
▪
mean, variance 를 통해 를 sampling 한 뒤, decoder 네트워크 통과
▪
decoder 네트워크를 통과한 결과가 output image (강의에서는 mean, variance 가 학습 결과로 나오는데 아닌듯!)
◦
Loss function 전개는 아래와 같고, 아래의 첫 두 항을 maximize 하는 것이 목표가 됨. (Maximum Likelihood Estimation)
◦
이후, encoder 를 제거하고 normal distribution 에서 를 sampling 하여 decoder 를 통과시키면 generative model 로 사용 가능!
GAN
•
Explicit 하게 model density 를 계산하려는 생각에서 벗어나는 것은 어떨까-?
•
게임이론적 접근
◦
Generator Network: Discriminator 를 속이려 함
◦
Discriminator Network: 실제 이미지와 Generated 이미지를 정확히 구별하려 함
•
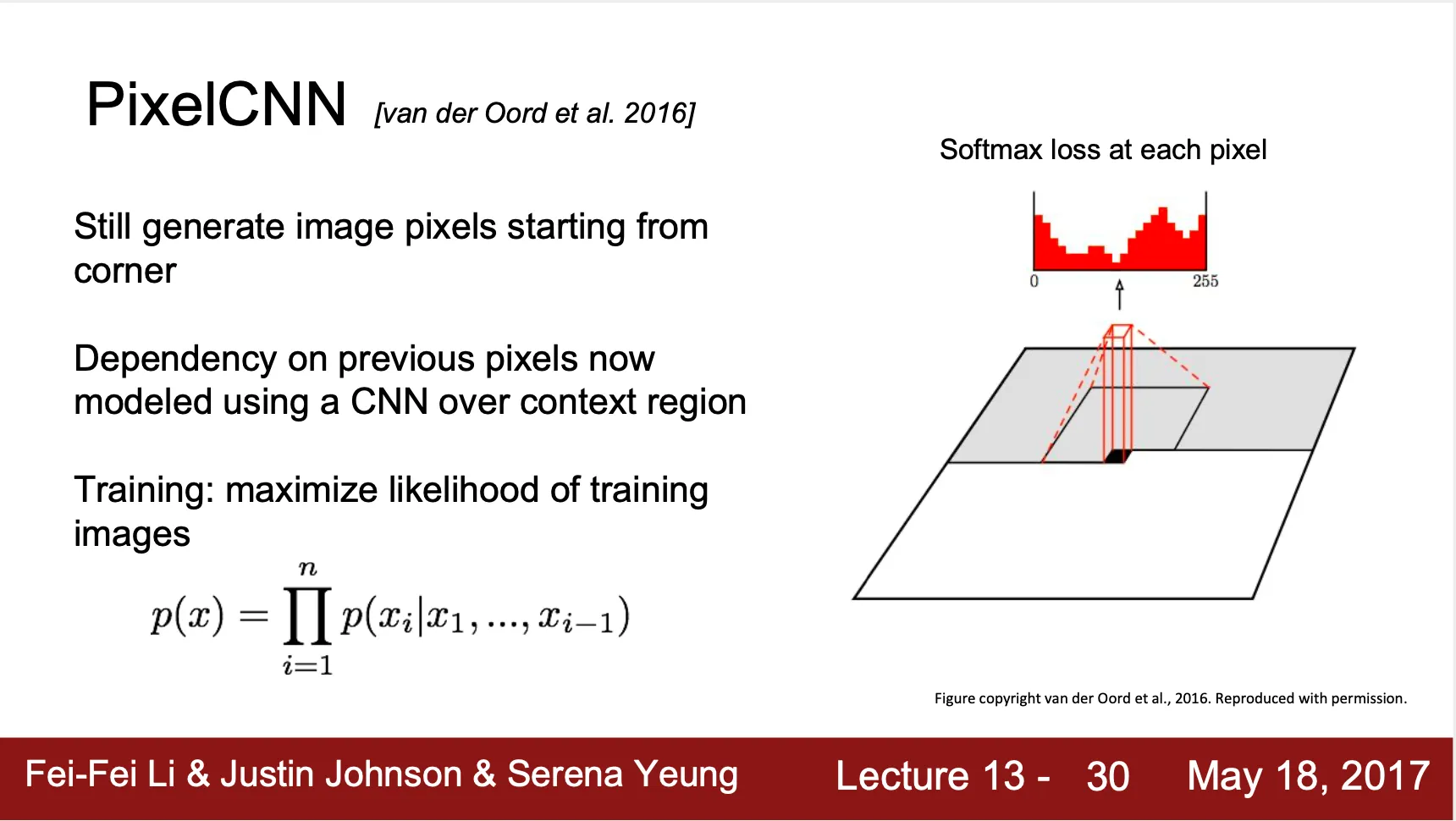
Minimax Loss Function
◦
◦
Discriminator 는 를 따르는 데이터 에 대해서 True (1) 로 판단하기를 원하고, 를 따르는 데이터 에 대해 생성된 이미지 는 False (0) 로 판단하기를 원함 → Maximize (Gradient Ascent)
◦
Generator 는 를 따르는 데이터 에 대해 생성된 이미지 에 대해서 True (1) 로 판단하기를 원함 → Minimize (Gradient Descent)
◦
다만, 는 가 0 에 가까울 때, 즉 generator 가 기능을 잘 못할 때 gradient 가 상당히 flat 하여 학습이 잘 되지 않는 문제가 있음
◦
때문에, Generator 의 경우 에 대한 Gradient Ascent 로 문제를 바꾸어서 해결
◦
Discriminator Train (weight update) → Generator Train (weight update) 반복
◦
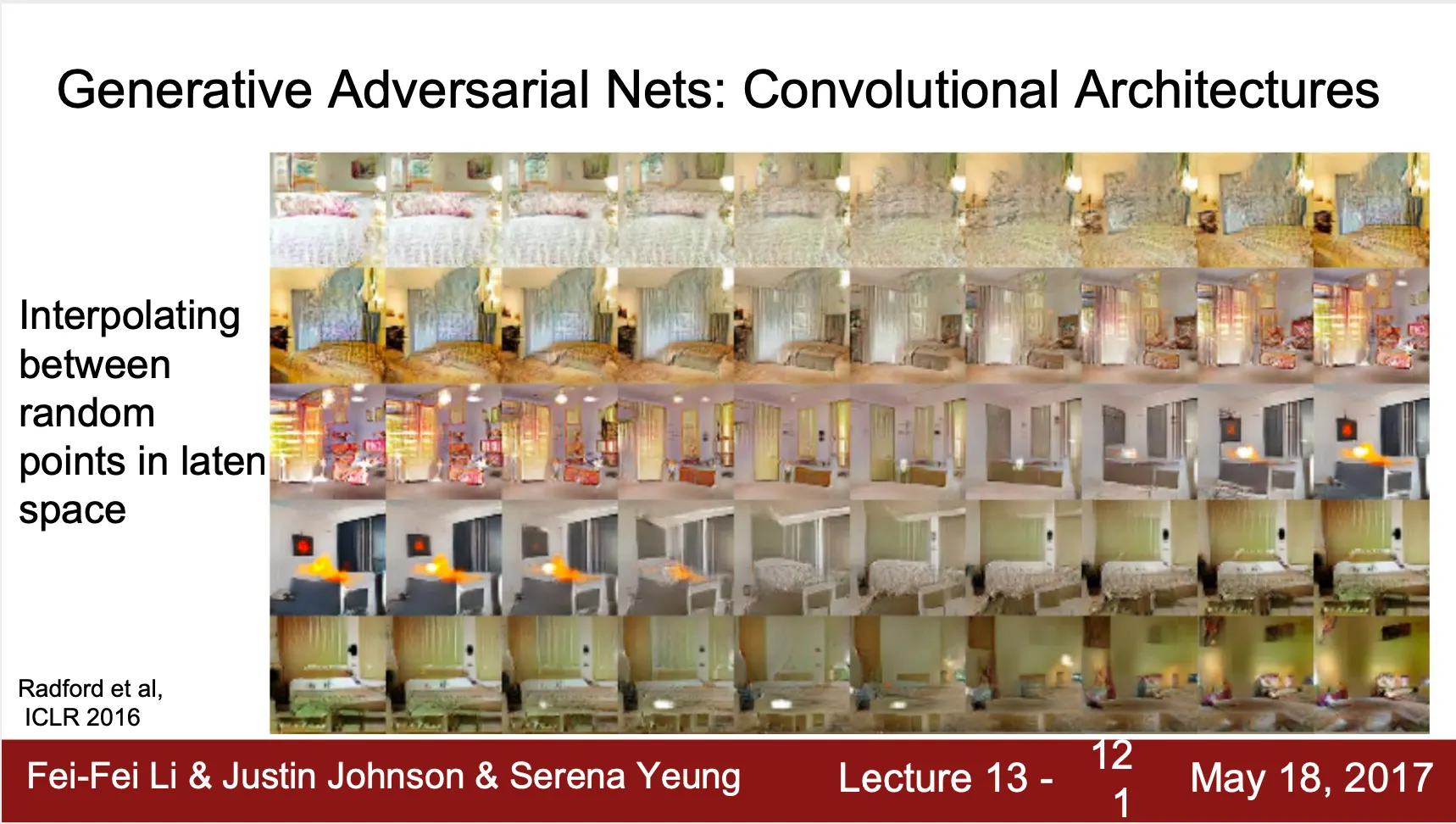
ICLR 2016, Alex Radford 가 Convolutional GAN 제시
•
두 개의 random noise 사이를 interpolate 하여 생성한 이미지도 smooth 하게 이어짐
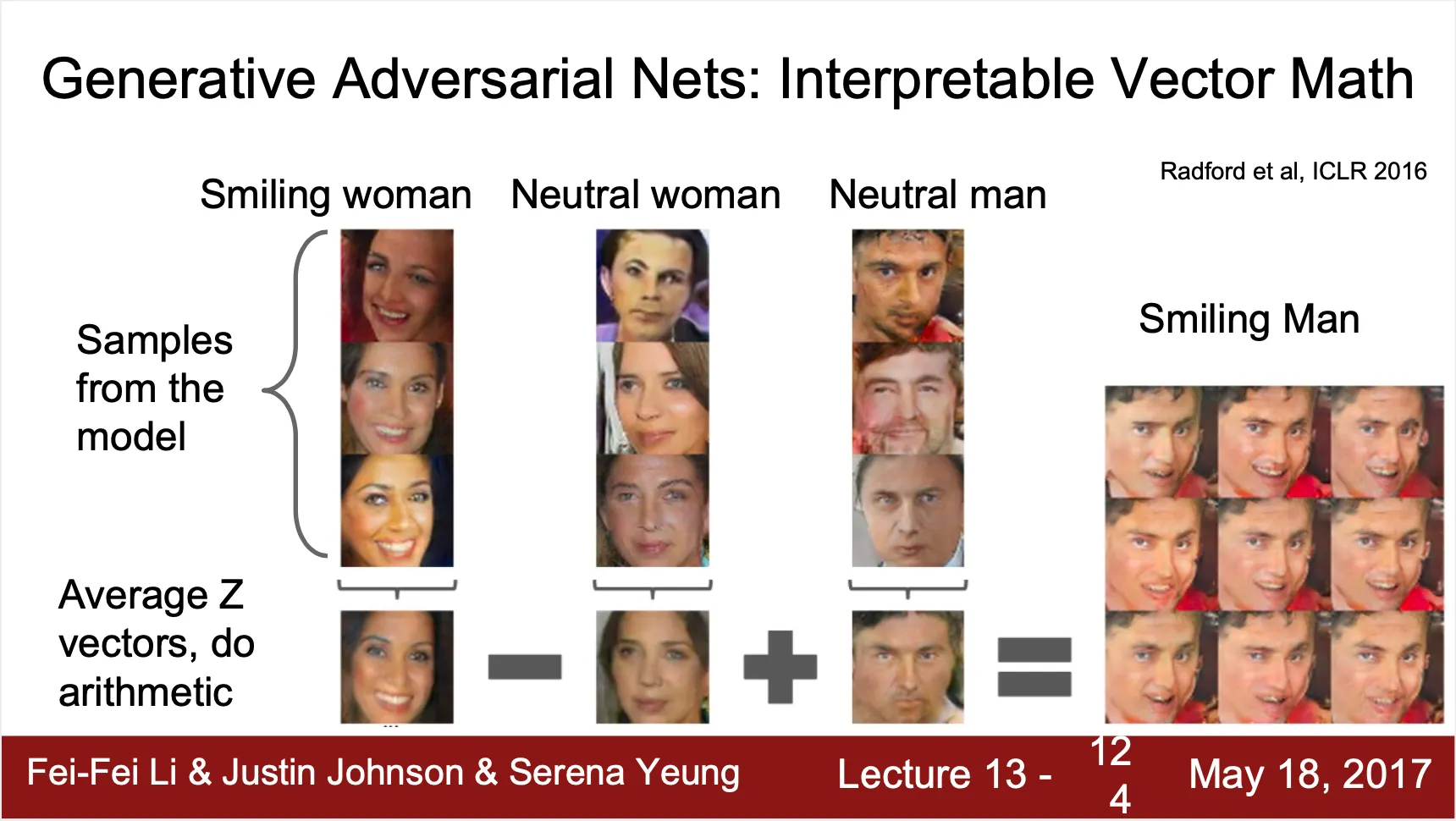
•
Random Noise 간의 mathematics 가 성립 (for fun)
•
장점
◦
State-of-the-art (performance)
•
단점
◦
unstable to train
◦
Inference query 에 대해서 시사하는 바가 없음