
본 포스트에서는 Point Cloud Upsampling 분야에서 새로운 방법론을 제시한 논문에 대해서 소개드리려고 합니다. 리뷰하려는 논문의 제목은 다음과 같습니다.
“Point Cloud Upsampling via Disentangled Refinement”

Objective
Point Cloud 는 자율주행, 로보틱스, 렌더링, 의료 분석 등 많은 어플리케이션에서 3D data 를 compact 하게 표현할 수 있는 방법으로 사용되고 있습니다. 이러한 Point Cloud 는 일반적으로 3D scanning 이라는 방법을 통해서 생성되는데 이렇게 생성된 Point Cloud 데이터는 아래 그림의 와 같이 종종 밀집되어 있지 못하고 균일하지도 않은 특성을 보입니다.
Point Cloud Upsampling
Point Cloud Upsampling 은 이러한 Point Cloud 의 단점을 극복하기 위한 분야입니다. 하지만, 단순히 sparse 한 input point cloud 로 부터 dense 한 point cloud 를 생성해내는 task 는 아닙니다. 논문에서는 효과적인 upsampling 을 위해서는 다음과 같은 두 가지 제약조건이 필연적이라고 거듭하여 강조하고 있습니다.
1.
생성된 Point 들이 underlying surface 에 잘 놓여 있어야 하고, (Proximity-To-Surface)
2.
Point 들이 underlying surface 에 놓여있는 분포가 균일해야 한다 (Distribution Uniformity)
머신러닝과 딥러닝 덕에 traditional 한 방법론을 성능에서 압도하는 여러가지 선행연구들이 이미 나왔고, 이들은 대부분 하나의 네트워크에서 dense 하면서도, underlying surface 에 faithfully 하게 놓여있고, 그 surface 위에서 균일하게 분포되어 있는 Point Cloud 를 생성하려고 했습니다. 하지만, 이러한 요구사항을 하나의 네트워크에서 모두 달성하기에는 매우 어려웠고 일반적으로 dense 한 point cloud 를 형성하기는 했지만 non-uniform 하고 noise 가 포함되어 있는 결과물들이 많이 등장했습니다.
논문에서는 이러한 상황에서 task 를 두 가지로 분리하는 아이디어를 제시합니다. coarse 하지만 dense 한 Point Cloud 를 형성해주는 task 와 앞선 task 로 생성한 Point Cloud 가 underlying surface 에 균일하게 놓이도록 조정하는 task 로 나눕니다.
Method
앞서 잠깐 언급드린 것처럼 논문에서는 기존에 다양한 조건들을 하나의 네트워크 속에서 달성하기 위한 시도로부터 벗어나 upsampling task 자체를 두 개의 목표로 분리합니다. Coarse 하지만 dense 한 Point Cloud 를 생성하는 것과 생성한 Point Cloud 의 Proximity-To-Surface 및 Distribution Uniformity 를 증가시키는 것이 그 두 목표입니다.
Two Cascaded Sub-Networks
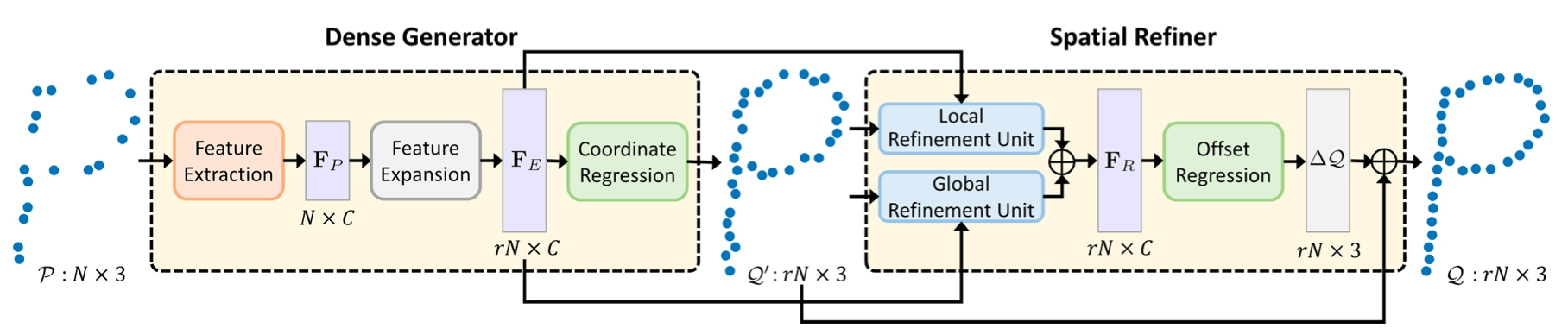
논문에서는 각각의 목표를 달성하기 위한 네트워크의 구조로 two cascaeded sub-networks 를 제안합니다. 이어진 각각의 network 가 각각의 목표를 달성하기 위해 사용된다고 보시면 됩니다. 논문에서는 이 두 네트워크를 각각 Dense Generator 와 Spatial Refiner 라고 명명합니다.
Dense Generator
Dense Generator 는 Spatial Refiner 의 존재 때문에 간단한 목표만을 가져갈 수 있게 됩니다. 네트워크의 이름대로 Sparse Point Cloud 를 단순히 dense 하게만 만들면 됩니다. 물론 완전 의미없는 위치의 point 들을 생성하면 안됩니다. 하지만, roughly 하게 surface 에 underlying 하는 Point Cloud 정도를 생성하는 것을 목적으로 학습을 진행할 수 있게 됩니다. 이렇게 간소화된 목표를 통해 학습 결과가 유연하게 나와도 상관이 없게 되고 네트워크가 복잡할 필요가 없으며 상대적으로 높은 upsampling rate 를 가져가기가 쉬워졌다고 합니다.
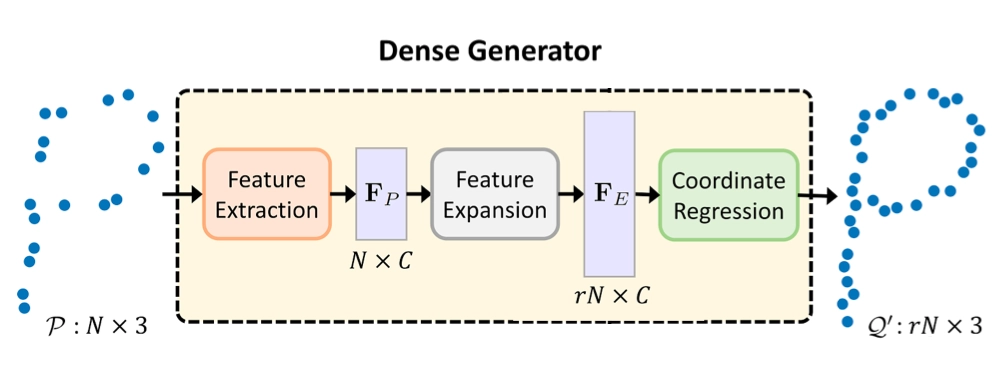
Dense Generator
위 그림과 같이 Dense Generator 의 input 은 로 3개의 coordinate 를 가진 Point N 개입니다. Dense Generator 내부는 Feature Extractor, Feature Expansion, Coordinate Regression 로 이루어져 있으며, input 은 이들을 거쳐서 최종적으로 배가 된 Point 를 output 으로 변환되어 반환됩니다. 이 때 tensor 는 에서 이 됩니다. 다음은 Dense Generator 를 이루는 각각의 방법론들에 대한 설명입니다.
Feature Extractor
Feature Extractor
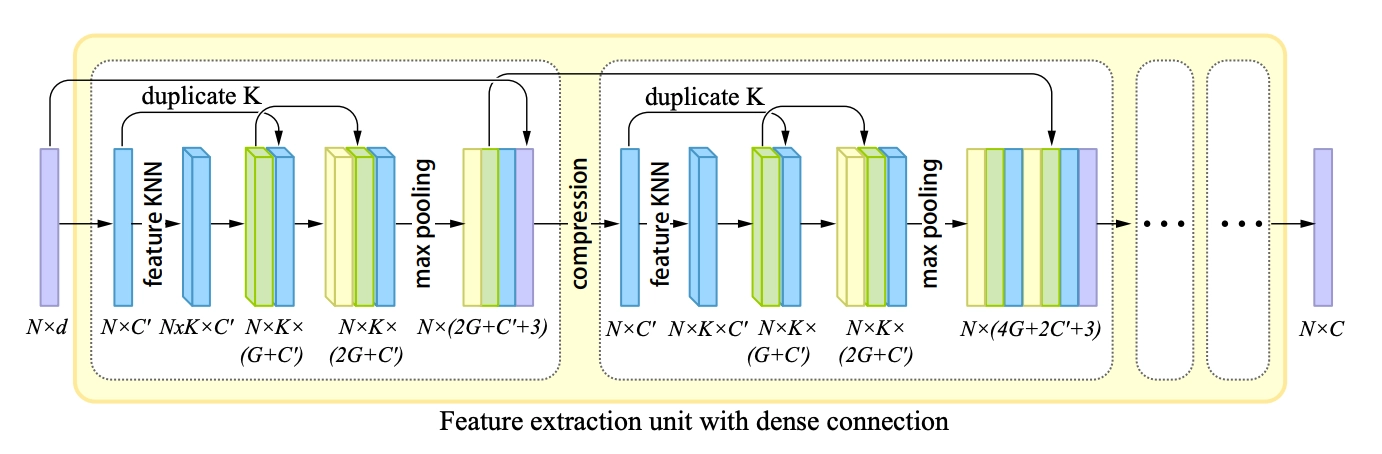
Feature Extractor 는 Patch-based progressive 3D point set upsampling 논문에서 제시한 네트워크의 구조를 차용하고 있습니다. 해당 논문에서 제시한 feature extractor 는 그림처럼 dense block 의 sequence 로 구성되어 있습니다. 각각의 dense block 은 input tensor 를 고정된 개의 feature 로 변환시켜주는 역할을 합니다.
Dense block 의 첫 번째 과정은 feature-based KNN 으로 feature 를 grouping 하는 과정입니다. 이는 Spatial Refiner 에서도 설명할 내용인데, 개의 point set 각각에 대해서 가장 가까운 개의 point 들을 grouping 하여 명시적으로 근접한 데이터임을 feature 에 반영하는 방법이라고 보시면 됩니다. 하나의 group 은 개의 point 들을 포함하고 있고 group 은 처음에 레퍼런스로 들어온 point set 의 개수인 개만큼 있고, 각 point 의 channel 은 개이므로 전체 tensor 의 dimension 이 이 되는 것입니다.
여기서 개의 Point 들만으로 개의 point 를 포함한 개의 group 을 만들면 중복된 point 들이 생길수도 있지 않나? 라고 생각하실 수 있습니다. 결론부터 말씀드리자면 생길 수 있습니다. 다만 앞서 설명드린 것처럼 feature 에 직접적으로 가까운 데이터임을 명시적으로 드러내어 학습에 용이한 feature 로 정제하기 위한 하나의 과정으로 이해하시는 것이 좋습니다.
Dense block 의 두 번째 과정은 densely-connected MLP 로 feature 를 refining 하는 과정입니다. 이 때 사용하는 MLP 의 output feature 의 개수는 개이며, skip connection 을 통한 tensor concatenate 를 통해 explicit 하게 정보를 재사용하는 효과를 기대했고 결과적으로 reconstruction accuracy 를 높이려고 했다고 합니다. 때문에 한 번의 MLP 를 거쳤을 때 나오는 tensor 의 dimension 은 개로 복제된 입력 에 MLP 로 나온 output dimension 인 를 더해 가 되는 것입니다. 이를 두 번 반복하게 되면 다시 또 가 더해진 가 나오게 됩니다.
Dense block 의 세 번째 과정은 Max-Pooling 과정입니다. 전체 tensor 를 개의 tensor 로 바라보았을 때 하나의 값을 pooling 각각의 tensor 내에서 하나의 값을 pooling 하도록 하고, 마찬가지로 제일 처음의 tensor 로부터의 skip conection 이 존재하여 이 제일 처음의 tensor 의 채널 수를 3 이라고 할 때 최종적으로는 의 dimension 이 나오게 됩니다.
추가적으로 두 번째 dense block 부터는 이전 dense block 의 마지막 feature 로부터의 skip connection 이 추가적으로 생기기 때문에 두 번째 dense block 의 경우 위의 그림처럼 과 max-pooling 된 이 더해진 이 됩니다. 그리고 적혀있지는 않지만 세 번째 dense block 의 경우 이 될 것임을 계산해볼 수 있을 것입니다.
Feature Expainsion
Feature Expansion 은 일반적으로 많이 사용되는 expansion operation 을 사용했다고 합니다. 이는 단순하게 기존의 feature 를 배만큼 duplicate 하는 방식으로, channel 수가 늘지 않고, 동일한 채널을 가지는 데이터의 수가 많아지도록 설계했습니다. 즉 feauture expansion 을 통해 기존의 dimension 의 tensor 를 로 변경했습니다.
Coordinate Regression
Coordinate Regression 은 논문에서도 중요하게 다루지는 않았습니다. MLP 를 통해 구현했다고 하고, 개의 channel 을 가진 tensor 를 다시 point cloud 로 변환하기 위해 3개의 channel 로 regression 을 진행하는 과정이라고 보시면 됩니다.
이렇게 세 개의 방법론들에 대해서 알아보았습니다. 하지만, Coordinate Regression 까지 거쳐서 나온 point cloud 데이터 은 여전히 non-uniform 및 noisy 한 특성을 가지고 있었기 때문에, 이어서 설명드릴 Spatial Refiner 에서 이러한 현상을 해결합니다.
Spatial Refiner
Spatial Refiner 는 앞서 설명드린 것과 같이 non-uniform 하고 noisy 한 point cloud 데이터인 을 underlying surface 에 균일하게 놓여있도록 조정하는 역할을 합니다.
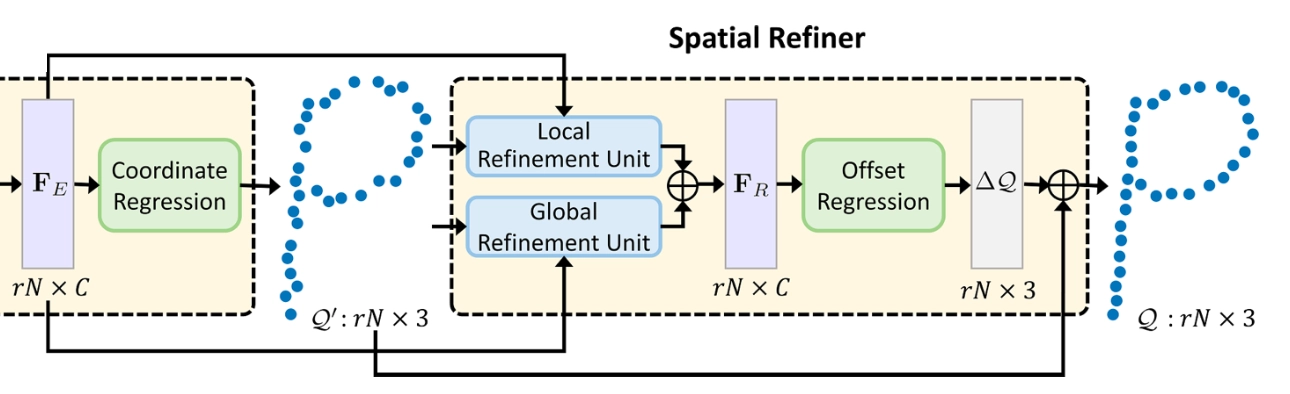
Spatial Refiner
위 그림과 같이 Spatial Refiner 의 input 은 non-uniform 하고 noisy 한 point cloud 데이터입니다. Spatial Refiner 내부는 (Local & Global) Refinement Unit, Offset Regression 으로 이루어져 있으며, input 은 이들을 거쳐서 최종적으로 refined 된 point 로 변환되어 반환됩니다. 이 때 tensor 의 크기에는 변화가 없습니다. 다음은 Spatial Refiner 를 이루는 각각의 방법론들에 대한 설명입니다.
Local Refinement Unit
Local Refinement Unit 은 point cloud 의 local geometric structure 를 고려한 형태의 조정을 위해 설계된 네트워크입니다. 이러한 local geometric structure 를 반영하기 위해 논문에서는 앞서 feature extractor 에서 사용했던 feature-based KNN 을 사용합니다.
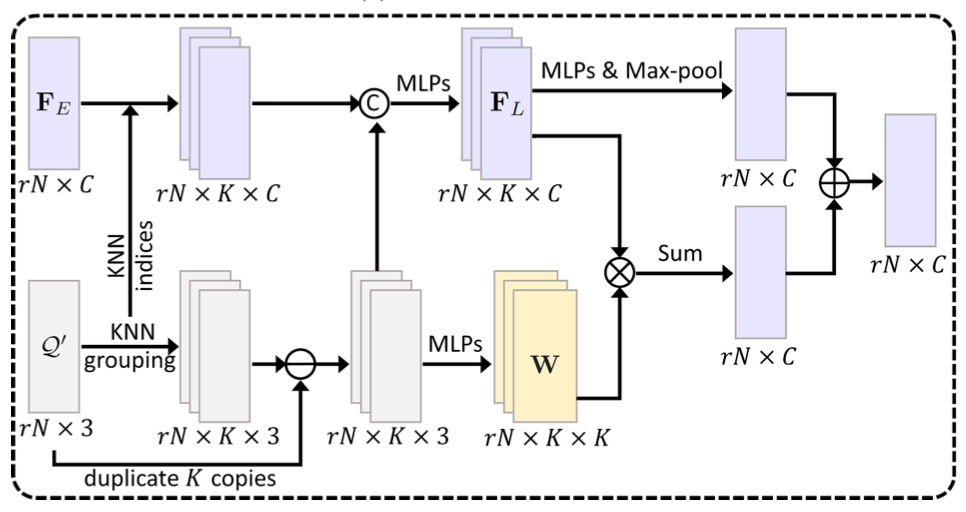
Local Refinement Unit
앞서 feature-based KNN 은 개의 point set 각각에 대해서 가장 가까운 개의 point 들을 grouping 하여 명시적으로 근접한 데이터임을 feature 에 반영하는 방법이라고 말씀드렸습니다. 여기서도 에 대해 해당 방법을 적용하고 근접한 데이터에서 복제된 reference point 를 빼는 형태로 가까운 point 들 사이의 거리에 대한 feature 를 생성하게 됩니다. 이 때, 에서만이 아니라 앞선 Dense Generator 의 feature 인 에 대해서도 tensor 상에서 동일한 위치의 값들이 인접하다- 라는 가정하에 index 를 그대로 끌고 와서 확장된 tensor 를 만들게 됩니다.
이후 앞선 의 KNN 으로부터 index 를 받아 가 확장된 dimension 의 tensor 는 가까운 거리에 대한 feature 와 concatenate 되어 MLP 를 거쳐서 새로운 feature 인 을 생성하게 됩니다. 이를 논문에서는 encoded feature volume 이라고 명명하는데, 저는 기존에 Dense Generator 단에서 생성된 크기가 큰 feature vector 에 nearest neighbor 에 대한 정보를 추가하여 local region 에 대한 국소적인 정보들을 volume 형태로 담고 있는 feature 라고 이해했습니다.
이렇게 생성된 로부터 최종적인 local point feature 를 얻어내기 위해서 MLP 및 max-pooling 을 거치게 되는데, 또 point 들 사이의 거리에 대한 feature 로부터 spatial weight 라고 부르는 값을 구하기 위해 MLP 를 사용한다고 합니다. 과 사이의 convolution 연산 이후에 생성된 tensor 와 에서 MLP 및 max-pooling 을 거쳐 얻은 tensor 모두 의 dimension 을 가지고 이에 대한 summation 으로 최종적인 local point feature 를 얻어내게 됩니다. 논문에서 이 부분에 대한 자세한 설계 이유를 제공해주지는 않고 있습니다만, 우선 local region volume 에 대한 feature 의 생성 이후 MLP 및 nearest neighbor 에 대한 정보의 재사용으로 최종적인 feature 를 완성하는 형태로 구현하여 local geometric strucuture 를 나타낼 수 있는 정보를 담을 수 있는 설계를 진행한 것으로 보입니다
Global Refinement Unit
Global Refinement Unit 은 point cloud 의 overall shape strucuture 를 고려한 형태의 조정을 위해 설계된 네트워크입니다. 여기서는 Self-attention generative adversarial networks 논문에서 self-attention unit 을 차용하여 썼다고 합니다.
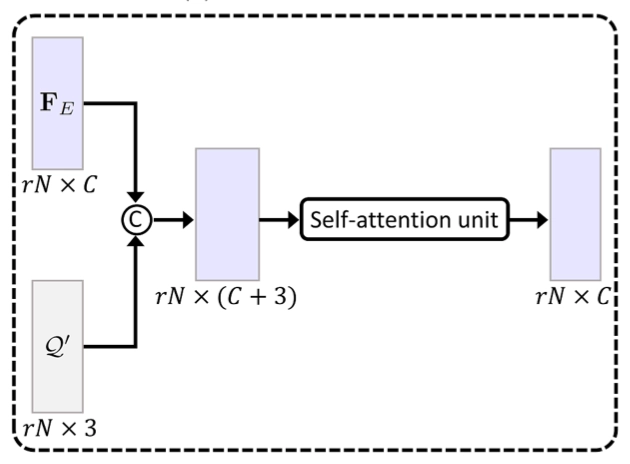
Global Refinement Unit
전체적인 point cloud 의 모양을 고려한 형태의 조정을 위해서 모든 shape strucuture 에 관한 정보를 잃지 않기 위해 와 데이터를 직접적으로 concatenate 했다고 합니다. 그렇게 생겨난 의 tensor 는 self-attention unit 에 들어가서 global feature map 을 산출하게 됩니다. 이러한 self-attention unit 의 사용은 모든 개의 point 들 사이의 attention weight 를 구하기 때문에 long-range context dependency 도 반영할 수 있고 전체적인 모양에 대한 feauture 를 형성할 수 있다고 합니다.
Offset Regression
절대적인 3D point 의 위치를 regression 을 통해 알아내는 것의 자유도와 범위가 크기 때문에 어렵습니다. 이에 비해서 범위 및 자유도가 적은 잔차는 학습하기 용이합니다. 이 때문에 네트워크에서는 ground truth 와 비교했을 때의 잔차를 학습하는 형태로 Offset Regression 을 진행하게 됩니다. 이렇게 구해낸 잔차를 기존의 입력 point cloud 인 에 더함으로써 최종적인 point cloud 의 형태를 얻어냅니다.
Patch-based End-to-end Training
앞서는 네트워크 구조를 기반으로 한 방법론에 대해서 알아보았습니다. 하지만 논문에서는 loss 관련해서도 특별하게 사용한 방법론을 설명합니다.
네트워크의 학습 과정 중에서는 특정한 sparse point cloud 에 대해서 coarse 하지만 dense 한 point cloud 와 최종적인 prediction point cloud 인 가 생성됩니다. 논문에서는 다른 여타 upampling approach 에서 그랬듯, 에 해당되는 ground truth point cloud 에 대해서 논문에서는 두 point cloud 모두를 penalize 할 수 있는 loss 를 설계합니다.
이 때, 는 Chamger Distance 로 의 경우에는 내의 point 들 각각에 대해서 에서 찾을 수 있는 가장 가까운 point 와의 distance 에 대한 평균이라고 보시면 됩니다. 는 와 사이의 가중치를 조정하는 요소이며, 학습의 초반 부에는 작은 값을 주어 이 그럴듯하게 나올 수 있도록 유도하고 점차 값을 키워서 Spatial Refiner 가 학습될 수 있도록 유도했다고 합니다.
Experiments & Results
Experimental Settings
Datasets
논문에서는 synthetic daasets 과 real-scanned datasets 모두를 이용하여 그들의 방법론이 효과적이었음을 보여줍니다. Synthetic datasets 는 PointPillars: Fast encoders for object detection from point clouds 에서 제공한 120 개의 training datasets 과 27 개의 testing datasets 을 사용했다고 합니다.
Training datasets 로는 제공한 120 개의 training datasets 하나 당 200 개의 겹쳐진 patch 들로 cropping 하여 사용했습니다. 그 결과 총 24000 개의 training datasets 을 얻을 수 있었고 각각의 training dataset 에서 point 만을 균일하게 sampling 하여 ground truth 를 구성했습니다. 이후, 이를 랜덤하게 downsampling 하여 를 구성했다고 합니다.
Test datasets 로는 MPU 와 PU-GAN 등을 따라서 poisson disk sampling 을 통해 20,000 개의 uniform points 인 를 얻어낸 뒤, 1024 개의 non-uniform points 를 그 속에서 생성해내 를 구성했다고 합니다.
Real-scanned datasets 으로는 각각이 2048 개의 point 로 이루어진, 15 개의 카테고리 내에서 2902 개의 point cloud objects 를 보유하고 있는 ScanObjectNN 을 사용했습니다. 다만, ScanObjectNN 에서는 dense points 를 제공해주지 않기 때문에 논문에서는 이 datasets 을 test 할 때만 활용했다고 합니다.
Evalutation metrics
정량적인 평가를 위해 논문에서는 다음 세가지 evaluation metric 을 사용합니다. 각각에 대한 설명은 다음과 같습니다.
1.
Chamfer distance
한 point cloud 내의 모든 point 들에 대해서 다른 point cloud 내의 point 중 해당 point 와 가장 가까운 거리를 가지는 point 와의 거리들의 평균값을 계산한 evalutaion metric
2.
Hausdorff distance
한 point cloud 내의 모든 point 들에 대해서 다른 point cloud 내의 point 중 해당 point 와 가장 가까운 거리를 가지는 point 와의 거리가 최대가 되는 point 에 대해서 그 거리의 값을 과 반대로 point cloud 를 기준으로 point cloud 에서 동일한 작업을 했을 떄 나오는 거리의 값을 라고 했을 때 를 계산한 evaluation metric
3.
Point-to-surface distance
이 metric 에 대한 구체적인 설명 및 자료가 불충분했지만, 저는 우선 point cloud 속 point 각각에 대해서 underlying surface 와의 거리들의 평균값을 계산한 evaluation metric 정도로 이해했습니다.
Comparison methods
논문에서 제시한 방법론의 효과를 보여주기 위해 논문에서는 point cloud upsampling 분야에서 SOTA 를 보여준 PU-Net, MPU, 그리고 PU-GAN 과의 비교를 시도합니다. 논문에서 준비한 training data 로 그들의 논문에서 제시한 setting 을 따라서 재학습을 진행했고 PUGeoNet 같은 경우는 코드를 사용할 수 없었기 때문에 comparison result 를 제공하진 못했다고 합니다.
Implementation details
논문에서 제시한 구현체의 세부적인 사항은 다음과 같습니다.
1.
Input point cloud 의 point 의 개수 N 을 256 으로 설정했습니다.
2.
TensorFlow 환경에서 batch size 는 28 이고, 400 epoch 동안 학습을 진행했습니다.
3.
Overfitting 을 방지하기 위해 random scaling, rotation, point perturbation 을 사용했습니다.
4.
Adam optimizer 를 사용했고, 초기 learning rate 는 이며 에 도달할 때까지 40 epoch 당 0.7 배로 낮추었습니다.
5.
설계한 loss 식에서 나타난 상수 는 0.01 에서 1.0 까지 linear 하게 증가시켰습니다.
Results on Real-scanned Dataset
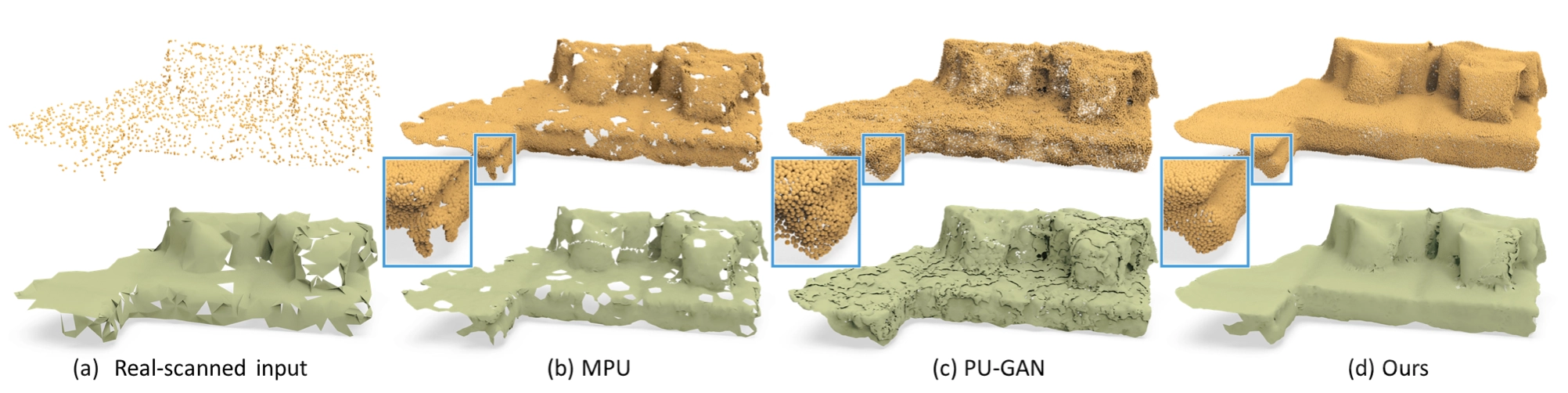
논문에서는 Real-scanned datasets 을 input 으로 하여 평가한 결과를 아래의 그림과 같이 정성적으로 보여줍니다. Real-scanned datasets 에 대한 정량적 분석은 논문에서 진행하지는 않습니다.
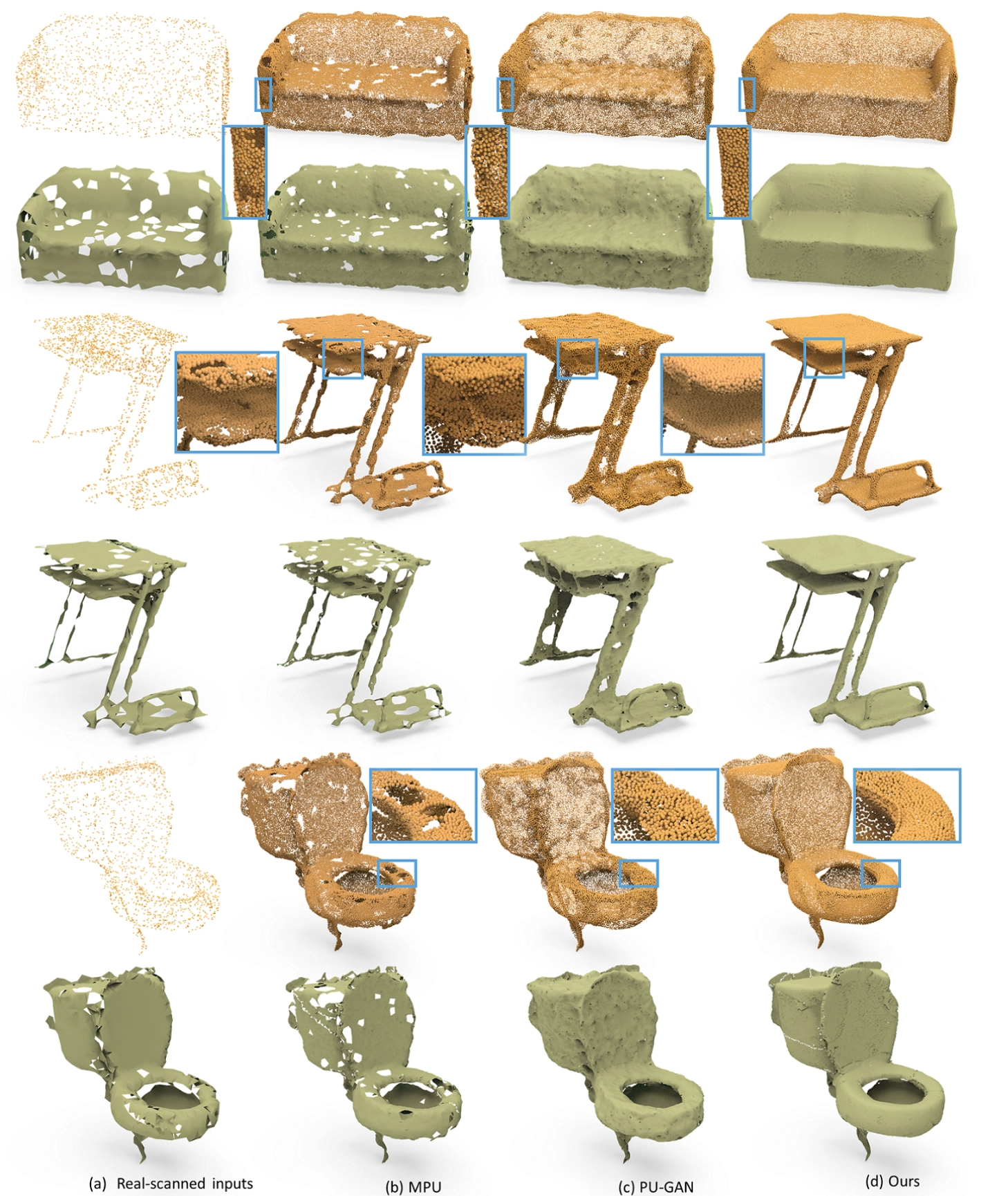
Real-Scanned Datasets: Qualitative Results
의 각 row 의 상단 point cloud 를 보면 굉장히 sparse 하고 non-uniform 한 것을 확인할 수 있습니다. 이 때문에 The ball-pivoting algorithm for surface reconstruction 에서 제시한 알고리즘을 활용해 3D Mesh 로 변환하더라도 구멍이 보이는 불완전한 모습이 보이는 것을 관찰할 수 있습니다.
기존의 upsampling 방법론 활용한 upsampled results 들은 결과물에 noise 가 있거나 균일한 output 을 만들어어내지 못했고, 이러한 point cloud 결과물은 reconstructed mesh 로 변환했을 때 거친 표면을 만들어내거나 작은 구멍들을 포함하고 있었습니다.
반면, 논문의 upsampling 방법론 는 uniform, dense 한 point 들을 생성해내는 것을 확인할 수 있었고 때문에 3D mesh 로 변환했을 때의 기하학적 구조도 smooth 하고 구멍이 없이 완전한 것을 볼 수 있었습니다.
Results on Synthetic Dataset
논문에서는 Synthetic datasets 을 input 으로 하여 평가한 결과를 아래의 그림과 같이 정성적으로 보여줍니다.
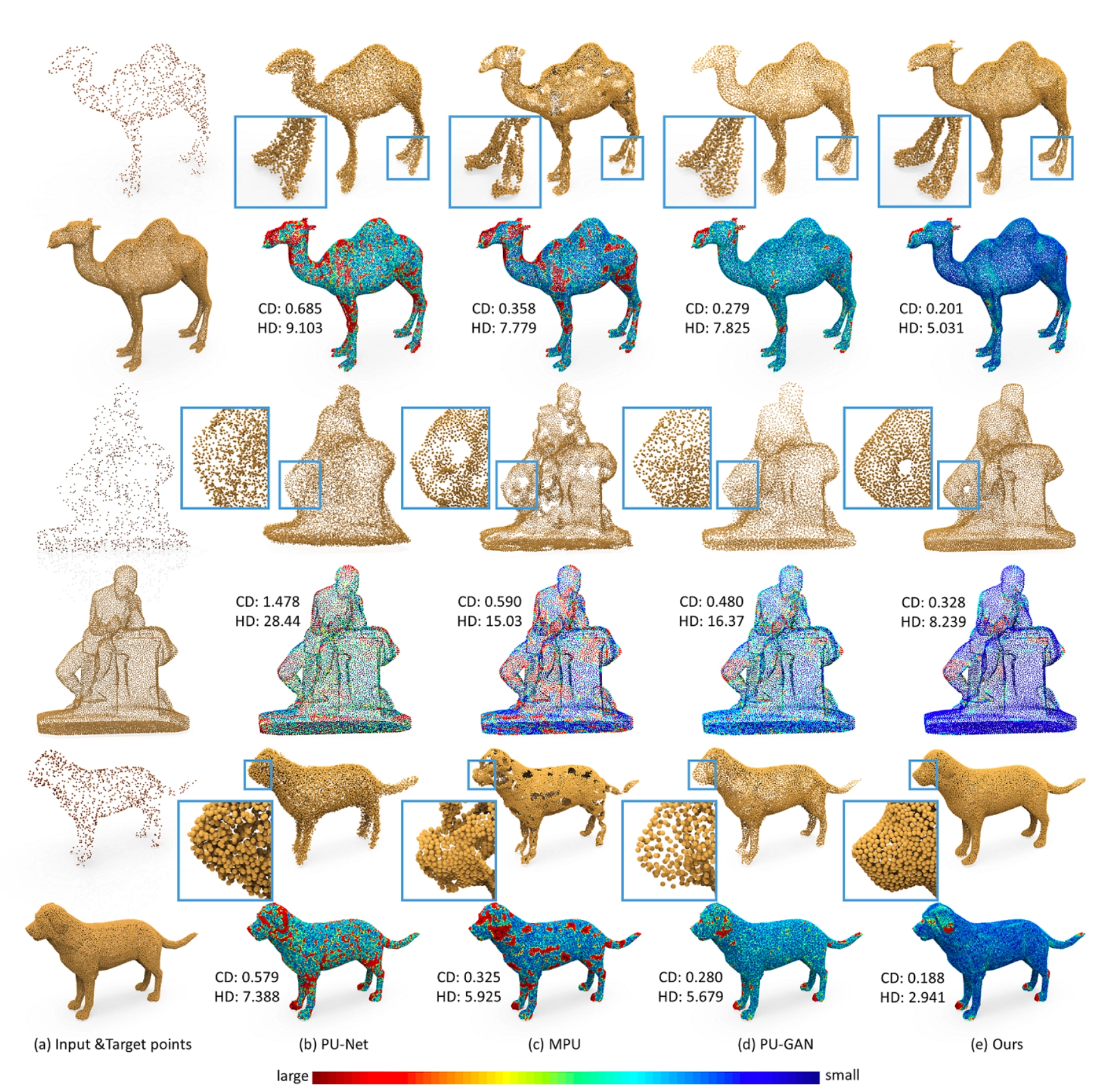
Synthetic Datasets: Qualitative Results
위의 그림은 의 input 과 target point 를 기반으로 기존의 방법론과 논문의 방법론이 산출해낸 결과를 비교한 것입니다. 의 경우에는 noise 가 심한 것을 확인할 수 있으며, 의 경우에는 non-uniformity 를 확인할 수 있습니다. 의 경우는 tiny structure 에 대한 destruction 을 볼 수 있습니다.
이와 달리 논문의 는 target point 와 굉장히 유사한 시각적 결과를 볼 수 있으며 논문의 방법론이 생성해낸 dense points 들은 local structure 를 균일하게 표현해낼 수 있었습니다.
더불어 아래의 푸른색 느낌의 point cloud 는 error map 을 의미하는데, 생성해낸 point cloud 속의 각각의 point 와 target cloud 의 point 와의 최소 거리에 따라 색깔을 다르게 표현한 것입니다. 논문의 가 작은 쪽에 속하는 푸른 빛깔이 가장 강한 것을 확인할 수 있었습니다.
논문에서는 Synthetic datasets 을 input 으로 하여 평가한 결과를 아래의 그림과 같이 정량적으로도 보여줍니다.
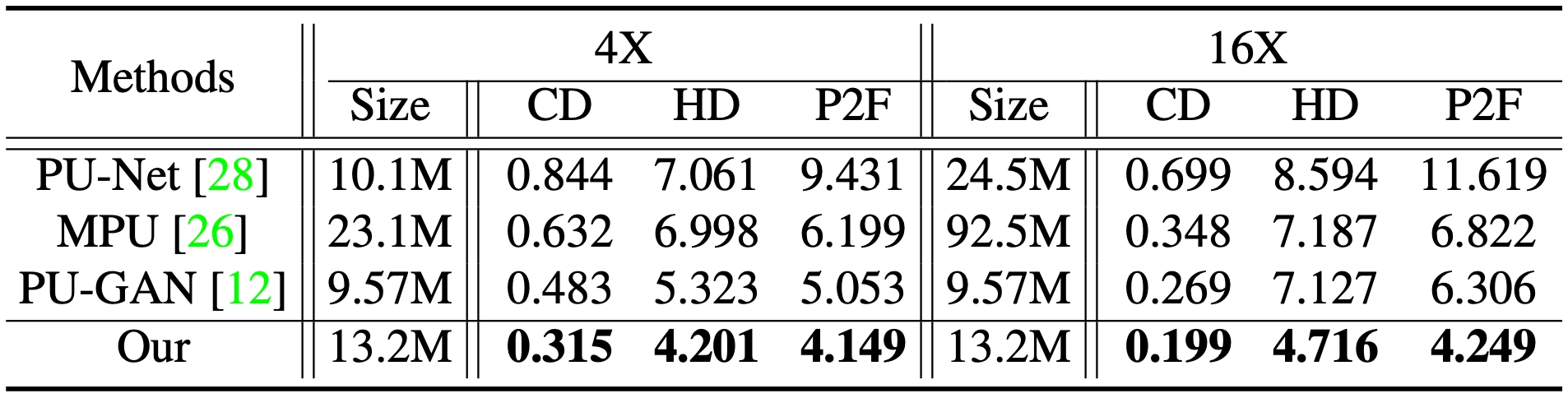
Synthetic Datasets: Quantitative Results
앞서 말씀드렸던 3 개의 evaluation metric 을 사용했고, 모두 PU-Net, MPU, PU-GAN 을 제치고 논문의 방법론이 모든 metric 에서 가장 작은 값을 보였음을 알 수 있습니다. 더불어 논문의 방법론이 기존의 방법론과의 특징적인 차이점은 upsampling rate 에 관계없이 일정한 parameter 수를 보인다는 점입니다. 이는 Dense Generator 에서 보여준 특징적인 Feature Expansion 때문인데 MLP 를 사용하지 않고 단순히 duplicated 하여 데이터를 upsampling 한 뒤에 regression 을 했기 때문에 의 조정에 따른 parameter 수의 변화가 없는 것입니다.
Noise Robustness Test
논문에서는 설계한 방법론이 얼마나 noise 한 input point cloud 에 대해서 robust 한지에 대한 내용도 평가하여 보여줍니다. 아래는 논문에서 정성적 및 정량적으로 보여준 결과입니다.
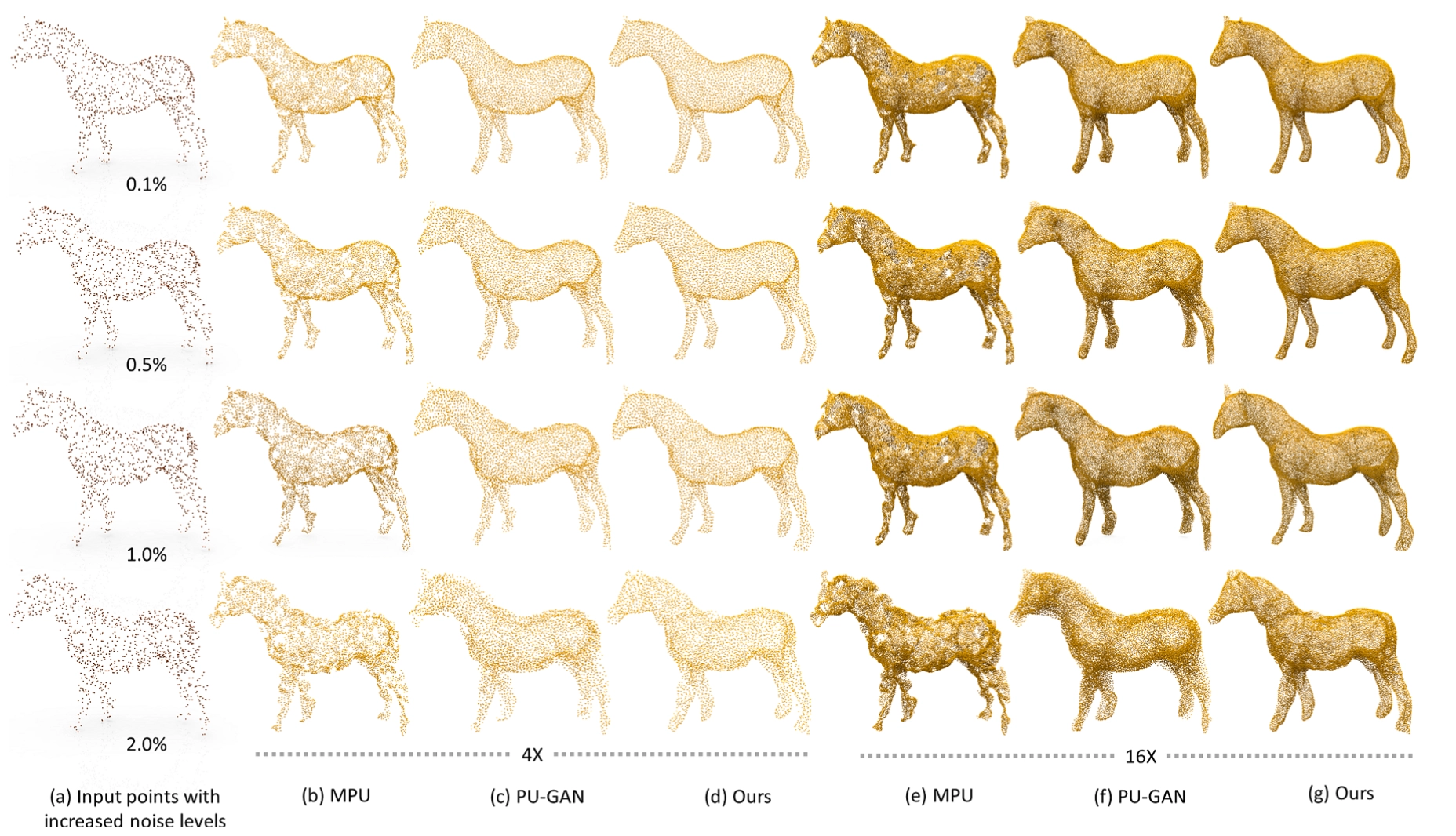
Noise Robustness Test: Qualitative Results
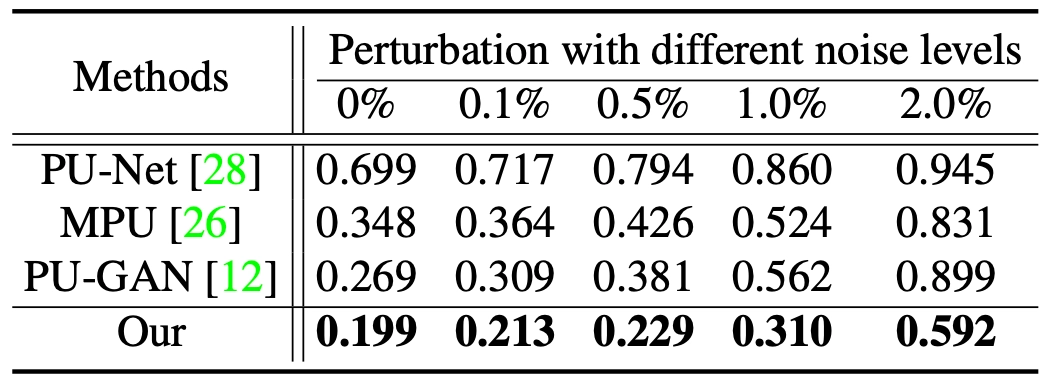
Noise Robustness Test: Chamfer Distance
두 개의 upsampling rate 모두에서 논문의 방법론이 과도한 noise 의 증가 없음을 정성적으로 확인할 수 있었습니다. 더불어 Chamfer Distance 기준에서도 noise 수준이 어떻든 간에 다른 방법론들에 비해서 좋은 metric 수치를 보여주었고 noise level 증가에 따른 metric 의 증가폭도 적었음을 볼 수 있었습니다.
Ablation Test
마지막으로, 논문에서는 그들이 세부적으로 설계한 방법론들이 실제로 효과가 있었음을 보여주기 위해 각각을 제거한 상태로 evaluation 을 진행한 결과를 보여줍니다. 그 결과는 다음과 같습니다.
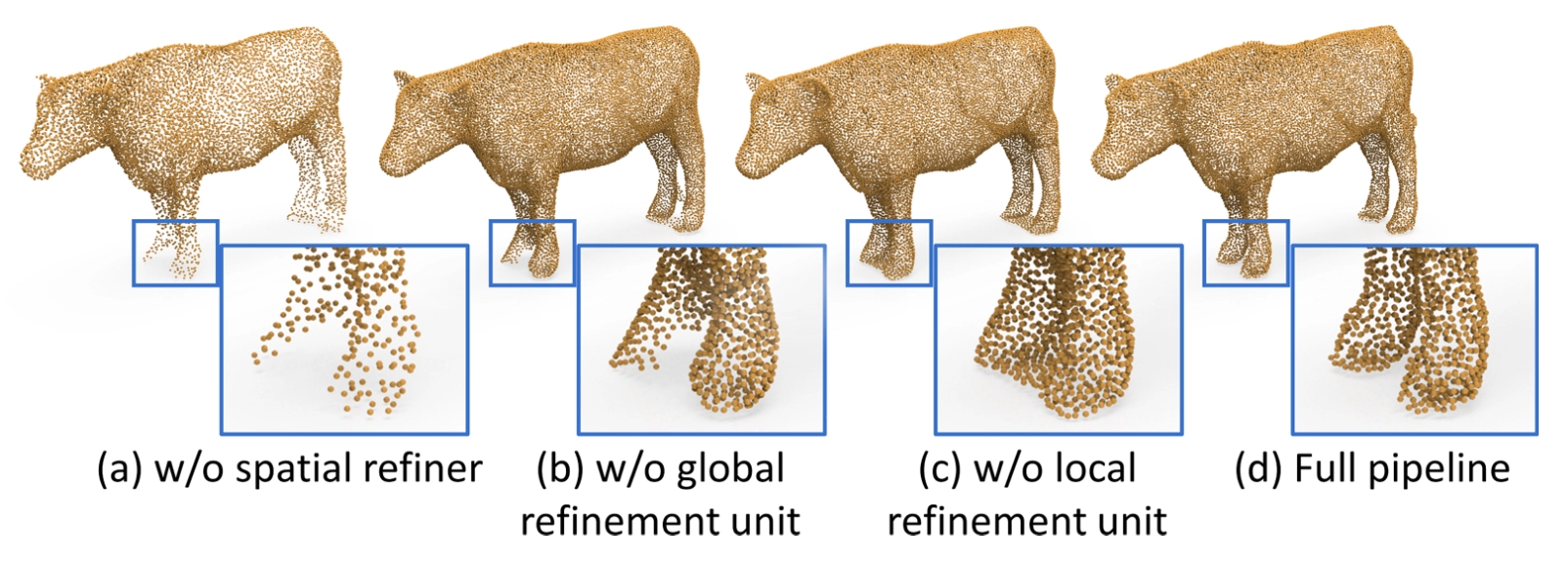
Ablation Test: Qualitative Results
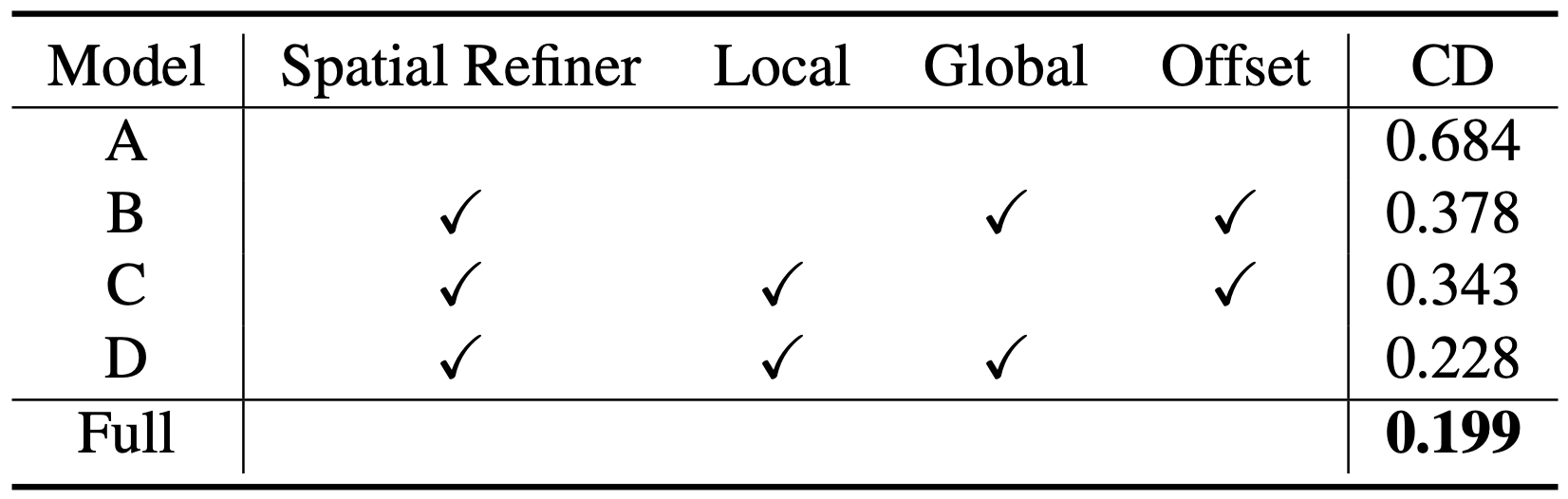
Ablation Test: Chamfer Distance
Model A 의 경우는 Spatial Refiner 자체를 없앤 경우이고, Model B, C, D 는 모두 Spatial Refiner 는 있지만 각각 Local Refinement Unit, Global Refinement Unit, 그리고 Offset Regression 을 없앤 경우입니다. Model D 같은 경우에는 Offset Regression 대신 Absolute 3D point Regression 을 사용했다고 보시면 됩니다.
정성적으로 보았을 때나 정량적으로 보았을 때나 Full Pipeline 의 경우가 가장 좋은 결과를 보여주었고, 각각의 방법론이 논문의 결과를 내는데 도움을 주었다는 사실을 알 수 있습니다. 논문에서는 언급하지는 않지만 정성적인 예시에서 제거한 방법론에 따른 생성된 point cloud 의 변화가 논문에서 의도했던 그 방법론의 동작과 일치한 형태라고 생각이 들었습니다.
Conclusion
이것으로 논문 “Point Cloud Upsampling via Disentangled Refinement” 의 내용을 간단하게 요약해보았습니다.
최근에 image super resolution 부분을 많이 다뤄서인지 Point Cloud Upsampling 이 처음보는 분야인데도 괜찮게 읽혔던 것 같습니다. 하지만, Global Refinement Unit 에 사용한 self-attention 부분에 대한 이해도가 부족하여 이 부분은 공부의 필요성이 많이 느껴졌던 것 같습니다. 전반적으로는 다른 논문에서 차용하여 가져온 구조들에 대한 구체적인 설명이 없어서 깊게 이해하기에는 시간이 많이 소요되지 않았나- 싶습니다.
이러한 부분들까지 고려하면 생각보다 논문의 난이도가 어려웠던 것 같습니다. 다만 그 만큼 얻어낸 것도 많은 것 같아 만족스러웠던 것 같습니다.