
A Hierararchy of Transformations
•
Translation
◦
Inhomogeneous
◦
Homogeneous
▪
2 DoF for translation
▪
Chain 과 inversion 을 적용하기 편리함
•
Euclidean (Rigid) Transform
◦
Inhomogeneous
◦
Homogenous
▪
1 DoF for rotation + 2 DoF for translation → 3 DoF
▪
Disatnce, angle, area, orientation (flipping 이 없다는 뜻임) 을 유지함
▪
Chain of two Euclidean Transforms 은 또다른 Euclidean Transform 임
▪
Rotation 은 원점을 기준으로 일어나기 때문에, 중심의 위치가 중요하고 때문에 rotation 과 translation 의 순서에 따라서 결과도 다름!
→ 보통 컴퓨터비전에서는 rotation 을 먼저, translation 을 다음에 적용함
•
Similarity Transformation
◦
1 DoF for rotation + 1 DoF for scale + 2 DoF for translation → 4 DoF
◦
Angle 을 유지함
•
Affine Transformation
◦
는 non-singular matrix (invertible)
◦
4 DoF for + 2 DoF for translation → 6 DoF
◦
Parallelism 은 보존됨
▪
교점이 infinity (ideal points) 인 두 직선을 고려했을 떄, 해당 교점이 tranform 이후에 어떻게 변하는가 → ideal points 로 유지됨 (변환 후에도 평행이라는 뜻!)
▪
Line at infinity 가 line at infinity 로 그대로 대응되는 것도 평행이 그대로 유지된다는 것을 의미함 (Line 의 transform 은 )
•
Projective Transformation
◦
Ideal points 가 ideal points 로 매핑되지 않을 수 있기 때문에 parallelism 이 깨짐
◦
4 DoF for + 2 DoF for translation + 2 DoF for → 8 DoF
◦
이 가능함!!!
◦
Conlinearity, cross-ratio (ratio of ratio of length) 가 보존됨
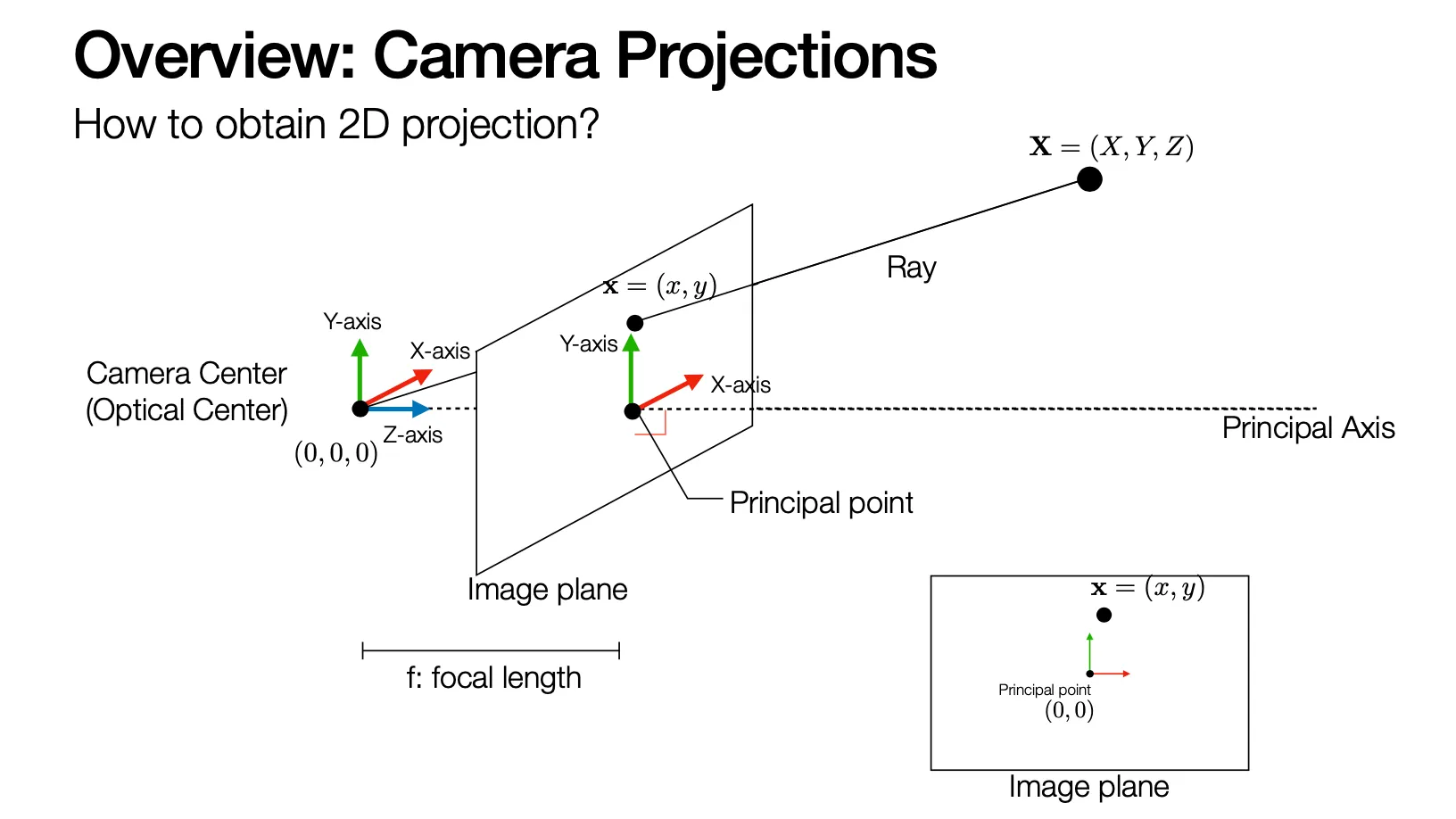
Overview: Camera Projections
•
Camera Model 은 Object, Camer, Image Center 로 구성된 체계
•
가장 기본적인 Camera Model 은 Pinhole Camera Model
Camera Projections
•
(focal length): camera center 부터 image plane 까지의 거리
•
Principal Axis: image plane 과 수직이고 camera center 를 지나는 축
•
Principal Point: principal axis 가 image plane 를 지나는 점
•
Ray: object 로부터 camera center 와 이어지는 선
•
Projection: object 의 각 점을 camera center 와 연결한 ray 와 image plane 이 만나는 점들로 구성된 상
•
상은 실제로 pinhole 뒤쪽에 upside-down 으로 맺히지만 그림의 편의상 pinhole 앞쪽에 image plane 을 그림
Camera Intrinsic Parameters
•
상의 크기는 어떻게 될 것인가?
◦
닭음과 그 비율을 이용해 계산할 수 있음!
◦
같은 ray 위에 있는 점들은 같은 점으로 projection 되기 때문에 에 관계없이 projection 은 같음!
•
Camera Projection 을 matrix 로 표현?
◦
입력은 homogenous, 출력은 homogeneous
◦
matrix 를 camera matrix 라고 부름
◦
camera matrix 는 실제로 intrinsic matrix 와 extrinsic matrix 로 나누어짐
▪
앞이 intrinsic (focal length 와 관련), 뒤가 extrinsic (부가적인 transformation)
▪
1 DoF
•
Offset Adding: 이미지 픽셀 coordinate 에서는 보통 origin 을 corner 에 두기 마련이므로, origin 을 옮겨주기 위한 offset adding 과정이 필요할 수 있음
◦
3 DoF
•
Unit Change: 3D coordinate 의 physical unit 을 2D pixel coordinate 의 pixel unit 으로 변경해주기 위한 scalar factor 를 도입하는 과정이 필요할 수 있음
◦
위는 4 DoF
◦
Pixel 이 square 이 아니라 tilted (sheared) 된 경우 추가적인 skew parameter 를 도입할 수 있음
◦
위는 5 DoF
•
최종적인 Intrinsic Parameter matrix 는 다음과 같음
Focal Length
•
Focal length 가 크면 장면이 커짐 (zoom-in) → 가 크기 때문에 상이 커지는 것임
•
Focal length 가 작으면 큰 object, view 를 볼 수 있음 (Field of View 가 커짐)
•
Zoom 을 하기 위해서는 큰 focal length 를, 큰 object 를 보기 위해서는 작은 focal length 를 사용하면 됨