
Camera Calibration
•
Camera Projection Matrx , 혹은 그것을 구성하는 요소인 를 얻는 방법임.
•
크게 DLT 와 Zhang’s Method, 두 가지 방법이 있음.
DLT
•
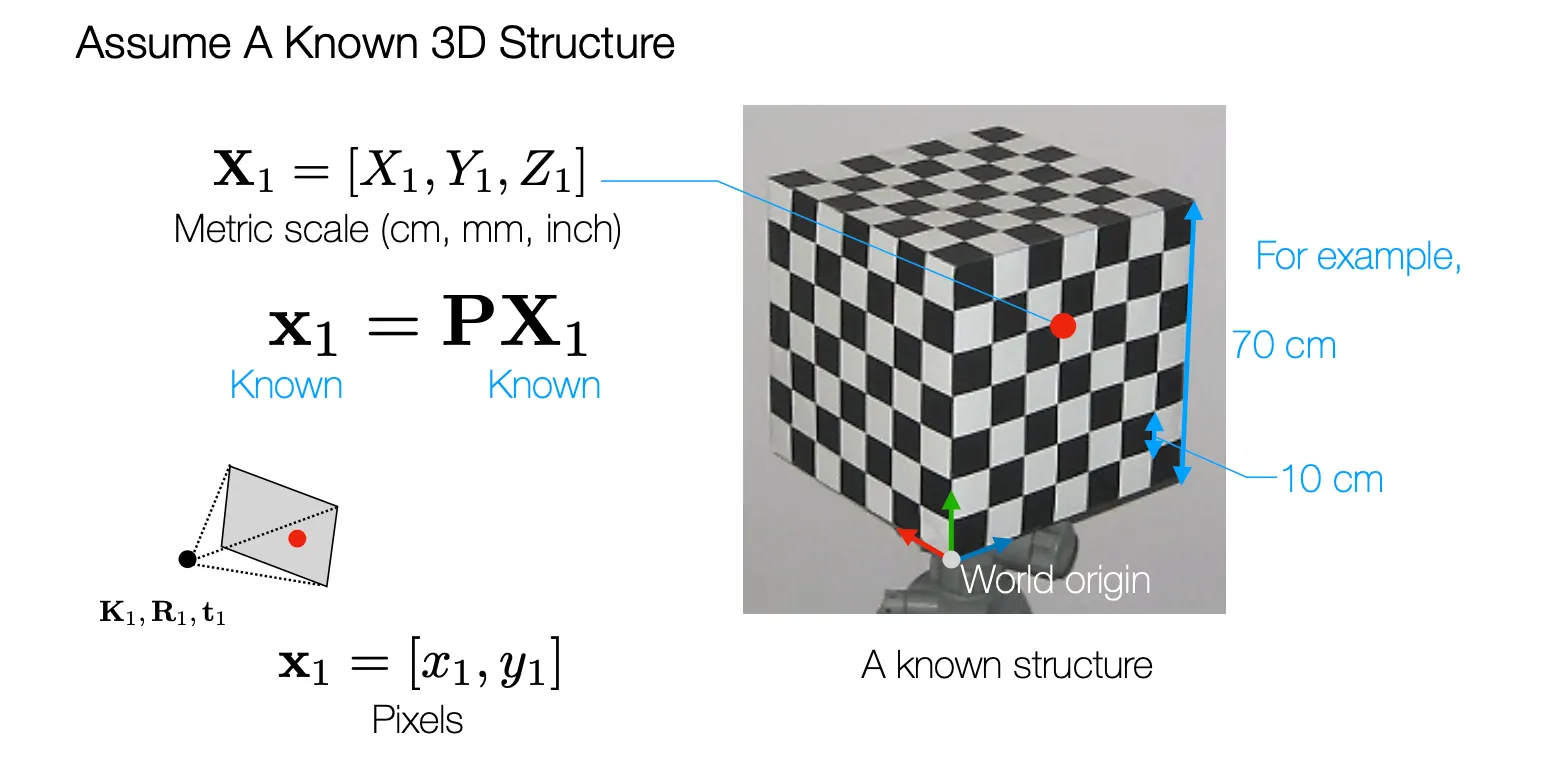
이미 알고 있는 3D Structure 에 기반한 방법임.
•
이미 알고 있는 3D Structure 이기 때문에 World Coordinate 에서의 위치 와, 이미지에서의 위치 모두 알고 있음.
•
를 구하기 위해 다음과 같이 DLT 방법론을 구성할 수 있음.
•
이는 Matrix Form 으로 나타내면 다음과 같음.
◦
11DoF System 이 구성되고 6 Corresponding Points 를 가지고 있으면 를 계산할 수 있음.
Summary: DLT for Computing
•
계산에 DLT 를 사용하는 방법론의 프로세스는 다음과 같음.
◦
이미 알고 있는 3D Structure 를 준비함.
◦
이미지를 준비함.
◦
6 개의 Corresponding Points 를 찾음.
◦
DLT 문제를 풀어 최종적으로 를 계산함.
•
계산에 DLT 를 사용하는 방법론의 단점은 다음과 같음.
◦
이미 알고 있는 3D Structure 를 준비하는 것이 어려움. (
◦
Degenerate 한 경우가 존재함.
1.
모든 point 가 동일한 plane 에 있는 경우
2.
모든 point 가 quadric 위에 있는 경우
Decomposition of the Camera Matrix
•
이므로, 를 알고 있다면 의 Null Space 를 통해 를 구할 수 있음.
•
은 의 좌측 matrix 를 RQ Decomposition 을 하여 구해낼 수 있음.
Uniqueness of K and R (RQ Decomposition)
•
는 Upper Triangle Matrix 가 됨.
•
은 Rotation Matrix 가 됨.
◦
→ Orthogonal !
◦
•
즉, RQ Decomposition 으로 구한 에 적어도 4 개의 variation 이 존재하기 때문에 엄밀히 말하면 unique 하지는 않음.
Zhang’s Method
•
Camera Calibration 을 할 때 가장 일반적으로 사용되는 방법론임.
•
Zhang’s Method 의 프로세스는 다음과 같음.
1.
알려진 사이즈의, Checkerboard Pattern 판을 준비함.
2.
하나의 viewpoint 에서 해당 Checkerboard 를 캡처한 이미지를 준비함.
3.
캡처한 이미지에서 보이는 Checkerboard Plane 상의 축을 로, 그것과 수직인 방향을 로 설정하고, Camera System 식을 구성함.
•
3D Coordinate 에서 임을 알 수 있음.
•
는 의 column vector 들임.
4.
4 개의 점을 뽑아서 식을 구성할 수 있기 때문에 Homography 를 구할 수 있음.
이는 다음과 같이 적을 수 있음.
5.
는 rotation matrix 의 column 이므로 orthonormal 하기 때문에 다음이 성립함.
이 때 로 지정할 수 있음.
6.
이렇게 구한 에 대해서 다시 또 DLT 를 사용할 수 있음.
앞선 식 , 로 두 개의 식을 구성할 수 있고 (왜 3 개가 아닐까…?), 총 3 개의 이미지를 통해 다른 Homography 를 구해낸다면, 를 구할 수 있음.
7.
를 구하면, Cholesky Decomposition 을 통해 를 구할 수 있음.
8.
를 구하면, Extrinsic Parameters 인 의 각 요소 는 다음과 같이 구할 수 있음.
9.
는 다음과 같이 구할 수 있음.
The Image of the Absolute Conic
•
사실 앞선 Zhang’s Method 에서 사용한 는 Absolute Conic 의 이미지와 동일함.
•
구체적으로 다루지는 않음.
Lens Distortion
•
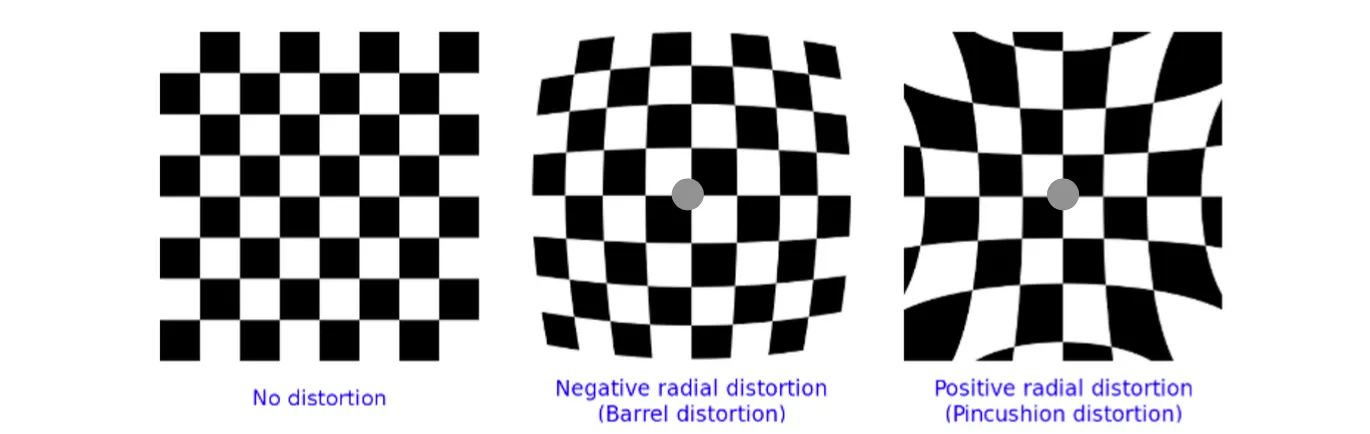
이미지 중심으로부터 멀 수록 Lens Distortion 이 심한 것을 알 수 있음.
•
Lens Distortion 을 없애는 과정이 필요함.
◦
Straight Line 은 이미지로 보았을 때도 Straight Line 이어야 함.
Lens Distortion Model
•
Distortion Parameters:
•
은 Camera Center (이미지 중심) 으로부터의 거리를 의미함.
•
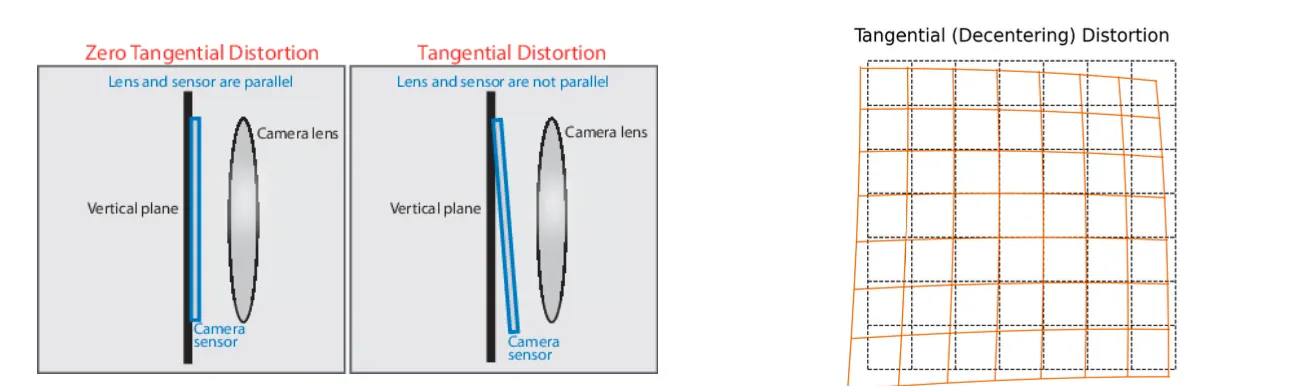
앞 부분 항목을 Radial Distortion, 뒷 부분 항목을 Tangential Distortion 이라고 함.
◦
보통 Tangential Distortion 은 무시할 수 있어 앞 부분만을 다룸.
•
일반적으로 이면 distorted pixel 값이 기존보다 커지기 때문에 Positive Radial Distortion 이 나타나고 이면 distorted pixel 값이 기존보다 작아지기 때문에 Negative Radial Distortion 이 나타남.
•
Radial Distortion 을 없애기 위해서 사용할 원본의 coordinate 는 Intrinsic Parameter 를 제거하고 (remove 2D projection, change to principle point offset) normalize 를 해야함.
•
Tangential Distortion 은 Lens 와 Image Plane 과 평행을 이루지 않는 경우에 한해서 나타나는 특이한 distortion 인데, 현대의 camera 에서는 많이 발생하지는 않음.
•
이러한 모델이 어떻게 유도되었는지는 구체적으로 다루지 않음. (Optics Course 를 수강하기를…)
Removing Lens Distortion
•
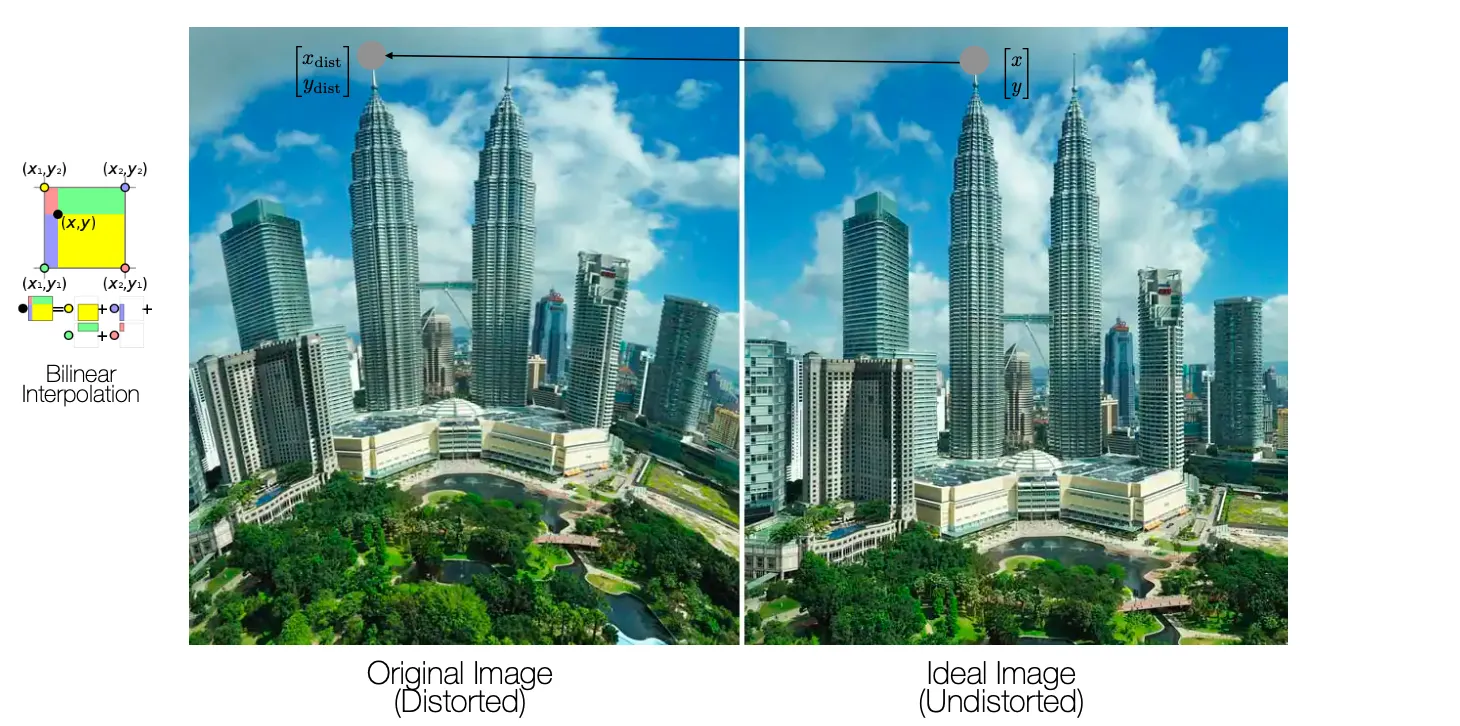
Original Image 로부터 Ideal Image 를 만들고 싶은 경우 Target (Ideal Image) 의 pixel 위치에서부터 시작하여 해당 픽셀과 대응되는 Original Image 의 픽셀 값을 찾고 (일반적으로 floating point) 그 값을 Bilinear Interpolation 을 통해서 계산해 가져와 만듬.
•
일반적으로 Homography 를 적용할 때도 마찬가지로 Target → Source 방향으로 값을 가져옴.