
1.
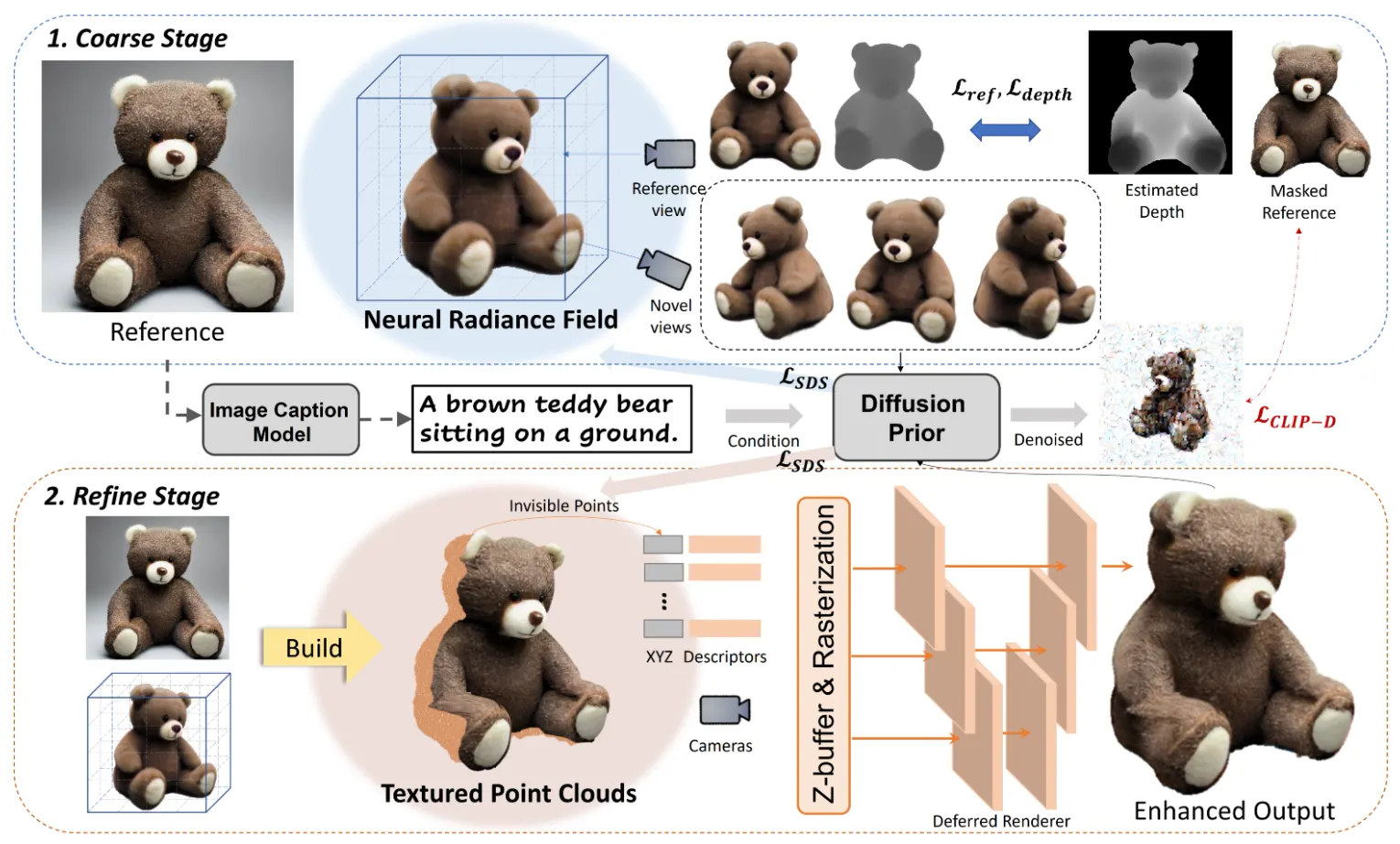
Coarse Stage: Making a NeRF using SDS + frontal depth, rgb + CLIP
2.
Refine Stage: Lifting front rgb to point cloud using NeRF, again optimize with diffusion prior (optimize 19-dimensional descriptor for each point whose first three are initialized with RGB colors)