Procedure of Classification
1.
Gather Positive / Negative Training Data
2.
Feature Extraction
•
이미지로부터 p-dimensional vector 의 feature 를 뽑아냄
3.
Train Decison Boundary
•
p-dimensional space 에서 p-1 dimensional hyperplane 을 정의하여 양분함.
Decision Boundary (or Surface)
•
A Hypersurface that partitions the underlying feature space into two sets, one for each class
•
Hyperplane 은 Linear 한 Hypersurface 로, Ambient Space 보다 한 차원이 낮은 Hypersurface 의 Subspace 임.
•
Examples
◦
2차원 공간에서의 1차원 Hyperplane:
◦
3차원 공간에서의 2차원 Hyperplane:
◦
4차원 공간에서의 3차원 Hyperplane:
◦
Generalized Hyperplane
▪
가 결정되면 Hyperplane 이 유일하게 결정됨.
Linear Decision boundary
•
의 boundary 를 기준으로 한 쪽 영역은 0 보다 큰 값이, 다른 쪽 영역은 0 보다 작은 값이 나옴. (→ 양수면 Face, 음수면 Non-Face 로 prediction 을 만들 수 있음.)
•
Linearly Separable 한 데이터셋을 나누는 여러 Decision Boundary 중 어느 것이 optimal 할까?
◦
SVM: Margin (or Safe Zone) 을 가장 크게 하는 Decision Boundary 가 optimal
◦
SVM 의 학습은 Margin 을 Maximize 하는 과정
(Reminder) Point-Plane Distance
•
Given a plane:
•
Normal Vector:
•
와 Plane 상의 거리는 를 방향으로 projection 한 값
•
Line Equation 을 으로 나타낸 경우, 다음과 같이 거리를 나타낼 수 있음.
Linear SVM
•
Margin 을 정의할 수 있는 특정 점 부터 까지의 거리 는 다음과 같음.
◦
•
Margin 을 최대화하는 것은 다음과 같이 나타낼 수 있음.
◦
위의 Constraint 를 하나로 다음과 같이 간소화 할 수 있음.
◦
Data Scaling 을 통해서도 동일한 결과를 얻을 수 있기 때문에 다음과 같이 변형할 수 있음.
▪
Quadratic Programming ( 에 대한 2차 함수와 linear constraint 를 가지는 문제) 을 해결하여 를 구할 수 있음.
Non-Separable Data
•
Positive / Negative Sample 이 Linearly Separable 하지 않은 데이터
•
일반적으로 High Dimensional Problem (Data 개수보다 Dimension 의 개수가 많은 경우) 이라고 부르는 경우를 제외하면 자주 발생하는 문제임.
•
이러한 Non-Separable Data 의 경우에는 Soft Margin 을 도입함.
◦
각 데이터 point 마다 로 표시하는, 얼마나 objective 를 어겼느냐를 나타내는 slack variable 을 둠.
◦
Objective 를 아래와 같이 변경함.
▪
Constraint 에 만큼 여유를 주는 대신, 여유를 주는 만큼을 최소한으로 작게 만들기 위해 objective 에 반영함.
▪
Wrong Side of Margin: Hyperplane 의 제대로 된 side 에 있지만, Margin 안쪽인 경우
▪
Wrong Side of Hyperplane: Hyperplane 의 올바르지 않은 side 에 있는 경우
▪
를 작게 주면 데이터들이 Constraint 를 어기는 것에 대한 Penalty 가 없기 때문에 Margin 이 커지게 됨.
▪
를 크게 주면 데이터들이 Constraint 를 어기는 것에 대한 Penalty 가 크기 떄문에 Margin 이 작아지게 됨.
Dual Form
•
The Duality Principle: Optimization Problem 은 두 개의 다른 관점으로 볼 수 있음.
◦
The Primary Form (Minimization Problem)
◦
The Dual Form (Maximization Problem)
▪
보통 Dual Form 이 수학적으로 해결하기 쉽고, Kernel Trick 을 사용할 수 있어 자주 사용됨.
▪
각 가 Lagrange Multiplier 를 가짐.
▪
Support Vector 들이 이고 나머지 친구들은 (Soft Margin 은 Constraint 를 어긴 데이터도 Support Vector 가 됨.)
▪
를 구한 뒤, 는 다음과 같이 복원할 수 있음.
•
Support Vector 만 이기 때문에 해당 데이터만 고려하면 됨.
▪
를 구하면 처음 Primary Form 으로 돌아가 다음 문제를 풀면 를 구할 수 있음.
▪
Test 단에서는 를 구하면 됨.
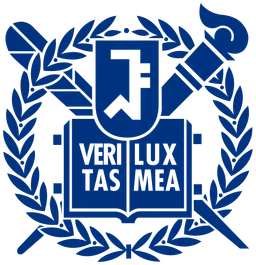
Linear Boundary Can Fail
•
선형적인 Decision Boundary 를 사용해서 실패하는 경우들이 있음.
•
다음과 같이 1-D 데이터를 quadratic mapping 을 하면 직선으로 나눌 수 있음.
Idea of Kernel Trick
•
데이터를 High Dimensional Space 로 mapping 하여 Linearly Separable 하게 만듬.
•
High Dimensional Space 에서의 Linear Decision Boundary 는 Original Space 에서 Non-Linear Decision Boundary 를 구현할 수 있는 방법이 됨.
•
Example
◦
Transformation function
◦
,
◦
→
▪
(Non-Linear Decision Boundary)
Kernel Trick
•
Dual Form 은 모든 데이터 사이의 dot product 를 필요로 함.
•
Kernel Trick 을 적용한다면, 에 대한 dot product 를 수행하는 것으로 볼 수 있음.
◦
에 대해서, 를 만족함.
◦
Dot product 를 2차원에서 수행하고 제곱하는 것이 훨씬 효율적임.
▪
Kernel Trick: 2 Multiplication + 1 Summation + Scalar Square (1 Multiplication)
▪
Original: Square of 2 Vector (3 Multiplication + 3 Multiplication) + 1 Dot Product (3 Multiplication + 2 Summation)
▪
위 차이가 만큼 반복해서 차이가 굉장히 커짐
•
실제로는 제곱까지 포함한 Kernel Function 를 다음과 같이 정의함.
◦
Original Feature Space 에서 dot product 진행 후 scalar 를 제곱함.
◦
유명한 Kernel Functions 들
▪
Polynomial
▪
RBF (Radial Basis Function)
▪
Sigmoid
▪
Histogram 형태 → Chi-Square, Histogram Intersections
Kernel Functions
•
Polynomial Kernel
◦
개의 feature 로 확장할 수 있음. (: original space dimension)
•
RBF Kernel (Gaussian Kernel)
•
Sigmoid Kernel
◦
자주 쓰이는 Kernel 은 아님.
•
어떤 Kernel Function 을 쓸 것인가 + Hyperparameter 등을 어떻게 설정할 것인가는 데이터가 주어졌을 때 다양하게 시도해보는 수 밖에 없음.
Kernel Functions for Histogram
•
Histogram Intersection Kernel
◦
각 벡터의 항목마다 중 작은 것을 선택하여 구성함. (두 histogram 상의 교집합을 찾는 효과)
•
Chi-Square Kernel
◦
Histogram 의 각 항목마다 뺀 값을 제곱하고 두 항목을 더한 것으로 나누어줘서 새로운 값을 구성함.
◦
시간이 오래걸려 일반적으로 Computer Vision 에서 많이 쓰이지는 않음.
Choosing a Kernel
•
Linear: Fast Training/Test - Start Here!
•
RBF
•
Chi-Squared, Histogram Intersection: Good for Histograms
•
Kernel Learning → Kernel Function 을 배우는 방법론
Summary of SVM
•
Classification 을 할 때 가장 많이, 안정적으로 쓸 수 있는 방법론
•
딥러닝 나오기 전에 Random Forest 와 함께 많이 사용되었고, 딥러닝 나온 후에도 Softmax 대신에 SVM 을 사용하기도 했음.