
Projecting a 3D Scene Plane
•
인 3D Real Coordinate 로부터 Image Plane 으로의 projection 은 위와 같이 나타낼 수 있음.
◦
즉, 3D 상의 Scene Plane 상의 점들과 2D Image Plane 사이의 변환은 Non-Singular matrix 이기 때문에 Homography 임.
•
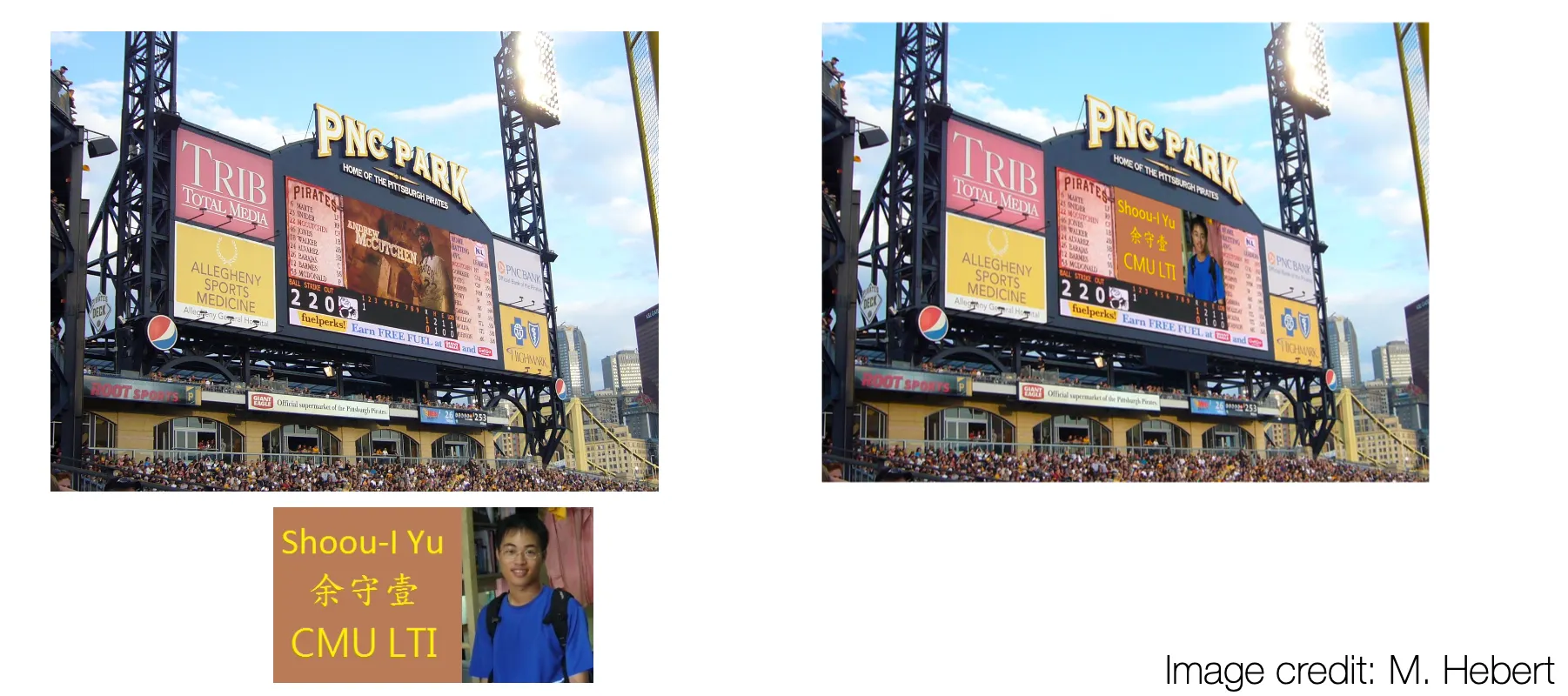
아래와 같은 이미지에서 전광판은 3D Scene Plane 이며, 이미지의 상에서 전광판의 네 Corner 를 기준으로 Homography 를 계산하여 이미지를 교체할 수 있음.
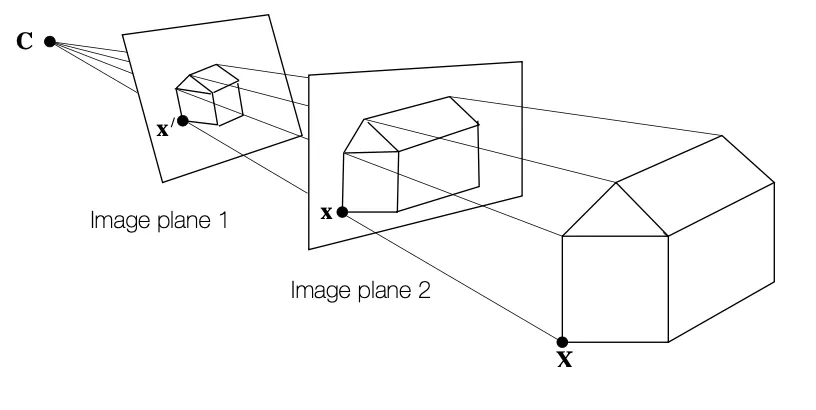
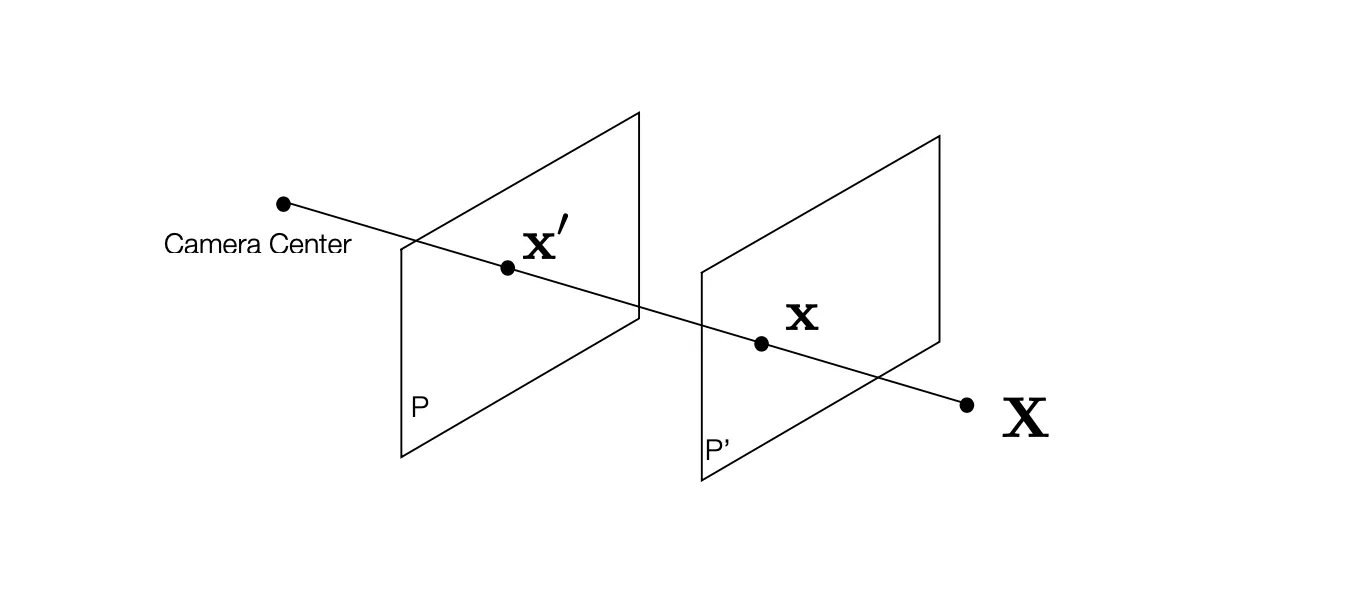
Cameras Sharing the Same Center
•
Camera Center 가 동일하고 Image Plane 이 다른 경우에 한 Image Plane 에서 다른 Image Plane 으로의 변환을 고려할 수 있음.
•
만을 이용해서 또 다른 Non-Singular matrix 인 Homography 를 형성할 수 있고, 이를 이용해서 변환이 가능함.
Moving the Image Plane with the Same Center
•
다른 모든 세팅이 동일하고 Focal Length 만 변하는 경우 ( 만 변경) 에 한 Image Plane 에서 다른 Image Plane 으로의 변환을 고려할 수 있음.
•
만을 이용해서 또 다른 Non-Singular matrix 인 Homography 를 형성할 수 있고, 이를 이용해서 변환이 가능함.
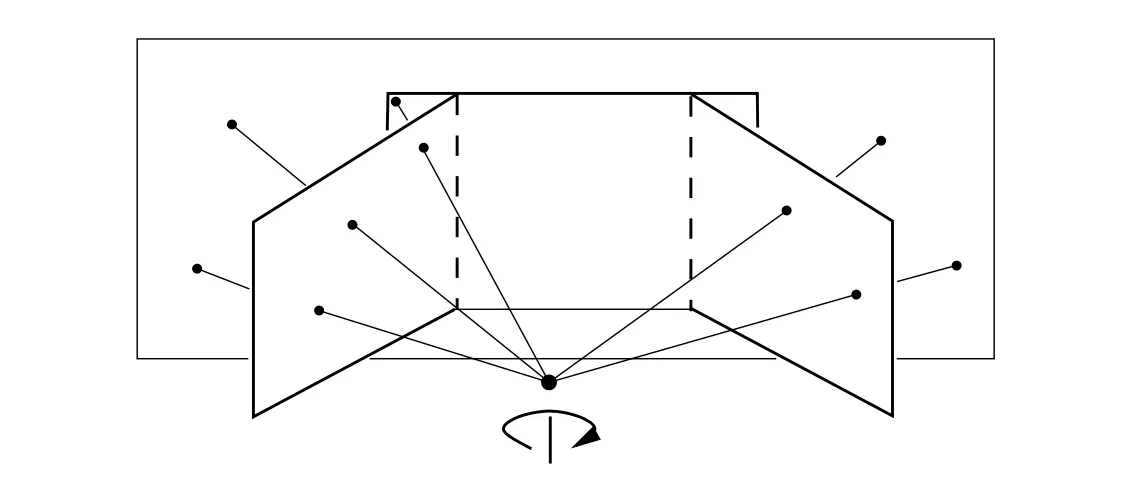
Pure Camera Rotation
•
Camera Center 는 고정이고 camera 를 rotation 만 시킨 경우 한 Image Plane 에서 다른 Image Plane 으로의 변환을 고려할 수 있음.
•
만을 이용해서 또 다른 Non-Singular matrix 인 Homography 를 형성할 수 있고, 이를 이 용해서 변환이 가능함.
Camera Sharing the Same Center: Summary
•
Camera Sharing Same Center 의 구체적인 예시로는 Focal Length 변화나 Pure Rotation 등이 있음.
•
3D Structure 에 대한 고려를 할 필요 없이 Homography 로 변환이 가능함.
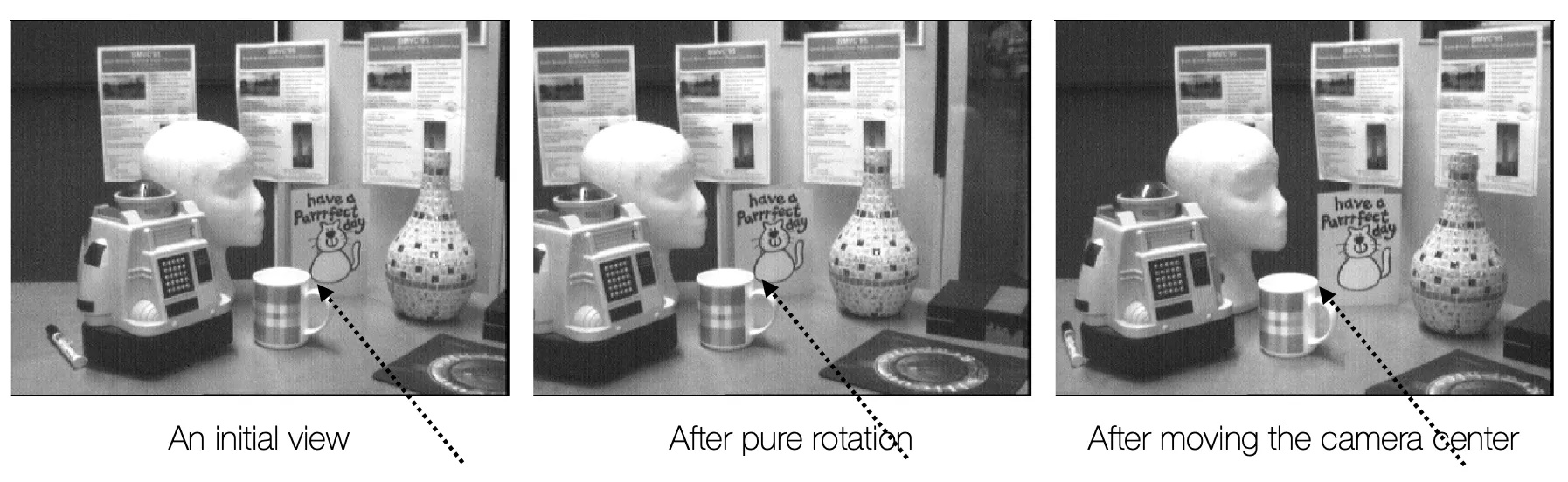
Motion Parallax
•
Camera Center 의 위치에 따라서 동일한 점으로 projection 되었던 두 점이 분리될 수 있음.
◦
이 상대적인 분리의 displacement 를 Motion Parallax 라고 함.
•
위 그림에서 컵과 그림은 교점이 생기는 형태가 Pure Rotation 에서는 유지되었지만, Camera Center 를 변경하면 해당 형태가 사라짐.
•
즉, Camera Center 가 바뀌는 경우에는 3D Structure 에 따라서 다르게 보일 수 있음.
◦
반대로 말하면, Camera Center 를 움직이면 3D Structure 에 대한 힌트를 얻을 수 있음.
What Does Calibration (or ) Give?
•
3D Ray 를 다음과 같이 정의할 수 있음.
◦
는 parameter 이고, 는 ray direction 임.
•
3D Ray 상의 점을 projection 하면 다음과 같은 식을 얻을 수 있음.
◦
Up-to-Scale 이기 때문에 항이 사라짐.
•
Intrinsic Parameter 를 알면, Projected Point 로부터 3D Ray 를 다시 얻어낼 수 있음.
•
이를 이용해 두 3D Ray 가 이루는 각도를 다음과 같이 구해낼 수 있음.
◦
◦
Orthogonal Ray 의 경우에는 임을 알 수 있음.
▪
역으로, Calibration 을 할 때 ( 를 찾고자 할 때) 이 방법을 사용할 수 있음.
The Image of The Absolute Conic
•
Plane at Infinity 위의 점 는 Ideal Point 이기 떄문에 다음과 같이 표현할 수 있음.
•
를 projection 하면 다음과 같은 식을 얻어낼 수 있음.
◦
Ideal Point 의 projection 은 Camera Center 에 무관함을 알 수 있음.
◦
은 Non-Singular matrix 이므로 Homography 고 라 할 수 있음.
•
Point 에 대한 Homography 가 일 때 Conic 의 변환은 이었고, Absolute Conic 에 대한 이며 Absolute Conic 의 각 점은 Ideal Point 이기 때문에 Absolute Conic 의 상은 다음과 같이 표현됨.
•
Image of Absolute Conic (IAC) 의 표현인 는 앞선 두 3D Ray 의 각을 산출할 때 필요한 요소였음.
◦
Orthogonal Ray 를 찾으면 식이 성립하고, 이를 만족하는 point 여러 개를 찾아 DLT 를 진행하여 를 구한 뒤에 Cholesky Decomposition 을 행하면 최종적으로 를 얻을 수 있음!
◦
은 6DoF (Symmetric Matrix) - 1DoF (Up-to-Scale) = 5DoF 를 가지기 때문에, DLT 를 통해 구해내기 위해서는 5 개의 Corresponding Point 가 필요함.
▪
근데, 를 이루는 3D Ray 위의 Point 5 개를 찾기는 굉장히 어렵기 때문에 실제 유용하진 않음.
▪
Zhang’s Method 에서 나왔던 항목이 IAC 와 동일하기에 해당 방법론으로 진행한다면 Calibration 에 3 Corresponding Points 가 필요함.
The Image of The Absolute Conic: Remark
•
Plane 는 Plane at Infinity 와 선에서 만나는데, 이 선은 Absolute Conic 와 의 Circular Points 에서 만나게 됨.
•
Image of Absolute Conic 는 Image of Circular Points 를 포함함.
A Simple Calibration Device
•
형태를 아는 물체를 준비하고, 캡처한 뒤에 Homohraphy 를 계산할 수 있음. (Planar to Image)
•
Planar 에서의 Circular Point 의 이미지에서의 대응점은 Homography 를 적용하면 되고, 다음과 같이 표현할 수 있음.
•
Circular Point 의 상은 IAC 위에 있으므로, 다음이 성립함.
◦
Zhang’s Method 에서는 의 특수한 경우에서 Homography 와 rotation matrix 의 column vector 의 관계를 바탕으로 calibration 을 했다면, 지금은 Absolute Conic 과 Circular Point 의 관계를 바탕으로 calibration 을 함.
◦
결과적으로는 Zhang’s Method 와 동일한 식이 나옴. → 5DoF, 한 Homography 당 2DoF 충족
•
만약 형태를 아는 물체가 3개정도 있어서 서로 다른 Homography 를 3개 구할 수 있을 경우 DLT 를 통해 Sigle Image Calibration 이 가능하게 됨.
Calibration via Orthogonal Vanishing Points

•
Square Pixel 이라는 가정이 존재하면 에서 이고, 기존의 가 3DoF 로 바뀜.
•
3 개의 Orthogonal Axis 가 이미지 내에서 존재하면, 세 쌍의 를 이루는 점들을 찾을 수 있고 이들 점들은 다음과 같은 수식을 만족함을 이전에 보임.
•
결국, 3DoF 인 와 세 쌍의 점들 이 존재하여 를 온전히 구해낼 수 있고 Single Image Calibration 이 가능함.
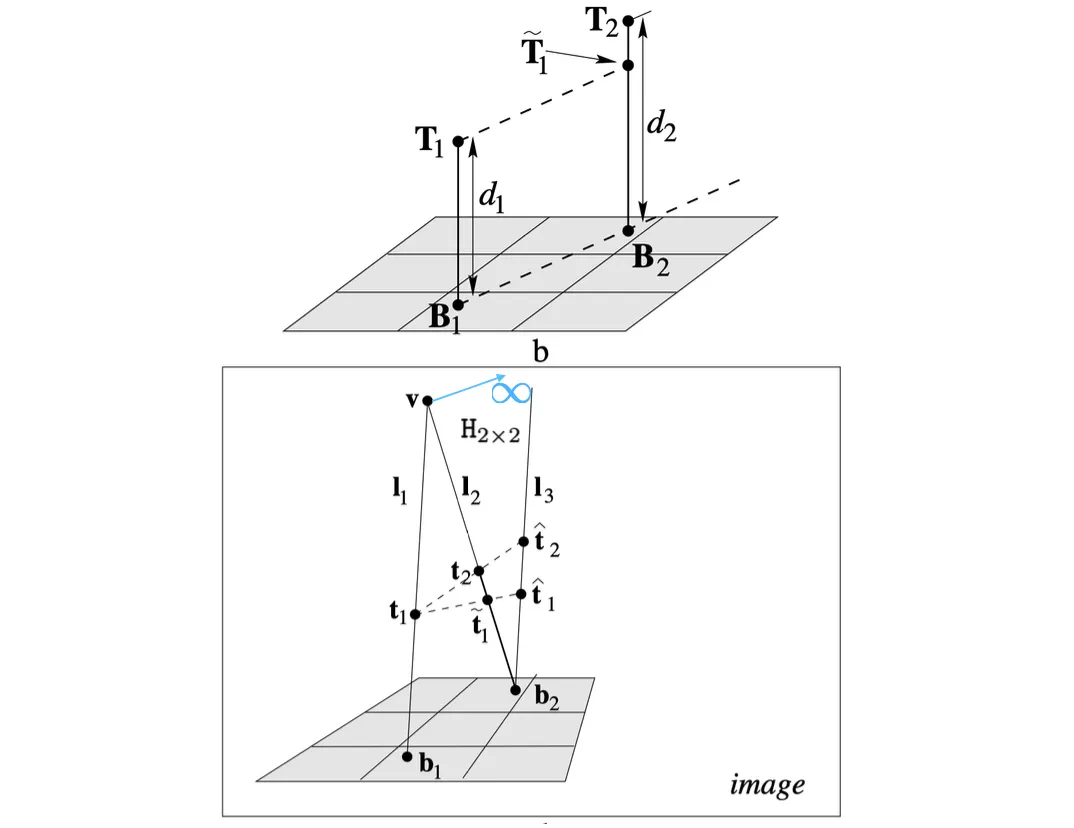
Measuring Height from a Single Image
•
Parallel Line 이 Vanishing Line 위의 점에서 만난다는 점을 이용해 실질적인 Height Ratio 를 비교할 수 있음.
•
원하는 평행한 (서 있는) 두 물체 의 밑 부분을 각각 라고 하고, Vanishing Line 을 이라고 하면, 를 이은 선과 Vanishing Line 의 교점은 다음과 같음.
•
를 이은 직선과 평행한 직선은 동일하게 에서 만나야 하므로, 한 물체 의 꼭대기 과 를 이은 직선과 다른 물체 와 만나는 점인 은 동일한 높이를 가지는 지점임.
•
이렇게 을 구하면, 는 한직선에 있고 두 물체가 평행하게 서 있으므로 두 물체가 나타내는 직선의 교점을 라고 하면, 이 또한 앞선 세 점과 같은 직선 상에 있으며 Ideal Point 가 됨.
•
궁금한 것은 의 길이와 (물체 1의 길이) 의 길이 (물체 2의 길이) 의 비율인데, Affine Transform 은 Length Ratio 를 유지하므로 다음의 mapping 을 시켜주는 1D Transform 을 통해 실제 평행한 두 선을 평행하여 ( 로 가도록) 만나지 않도록 변경할 수 있음. (실제 3D 에선 만나지 않기 때문임.)
•
해당 transform 을 적용하면 과 는 다음과 같이 변형됨.
•
즉 위 식을 이용해서 최종적인 Length Ratio 는 다음과 같이 계산할 수 있음.