
Random Variable
•
Random event 의 outcome 을 real scalar value 로 mapping 해주는 함수
•
특정 시행 이전에는 값을 예측할 수 없는 numerical value
•
동전을 던지는 시행 예시
•
Discrete vs. Continuous
◦
Discrete
▪
Discrete Sample Space 를 가짐
▪
Probability Mass Function (PMF)
▪
ex. Binomial Distribution
◦
Continuous
▪
Continuos Sample Space 를 가짐
▪
Probability Density Function (PDF)
•
밑넓이의 합은 1 이어야 함
•
모든 에 대해
▪
ex. Gaussian Distribution
▪
특정 값을 가질 확률 자체는 0, 범위를 가질 확률은 PDF 의 밑넓이
Probability Theory
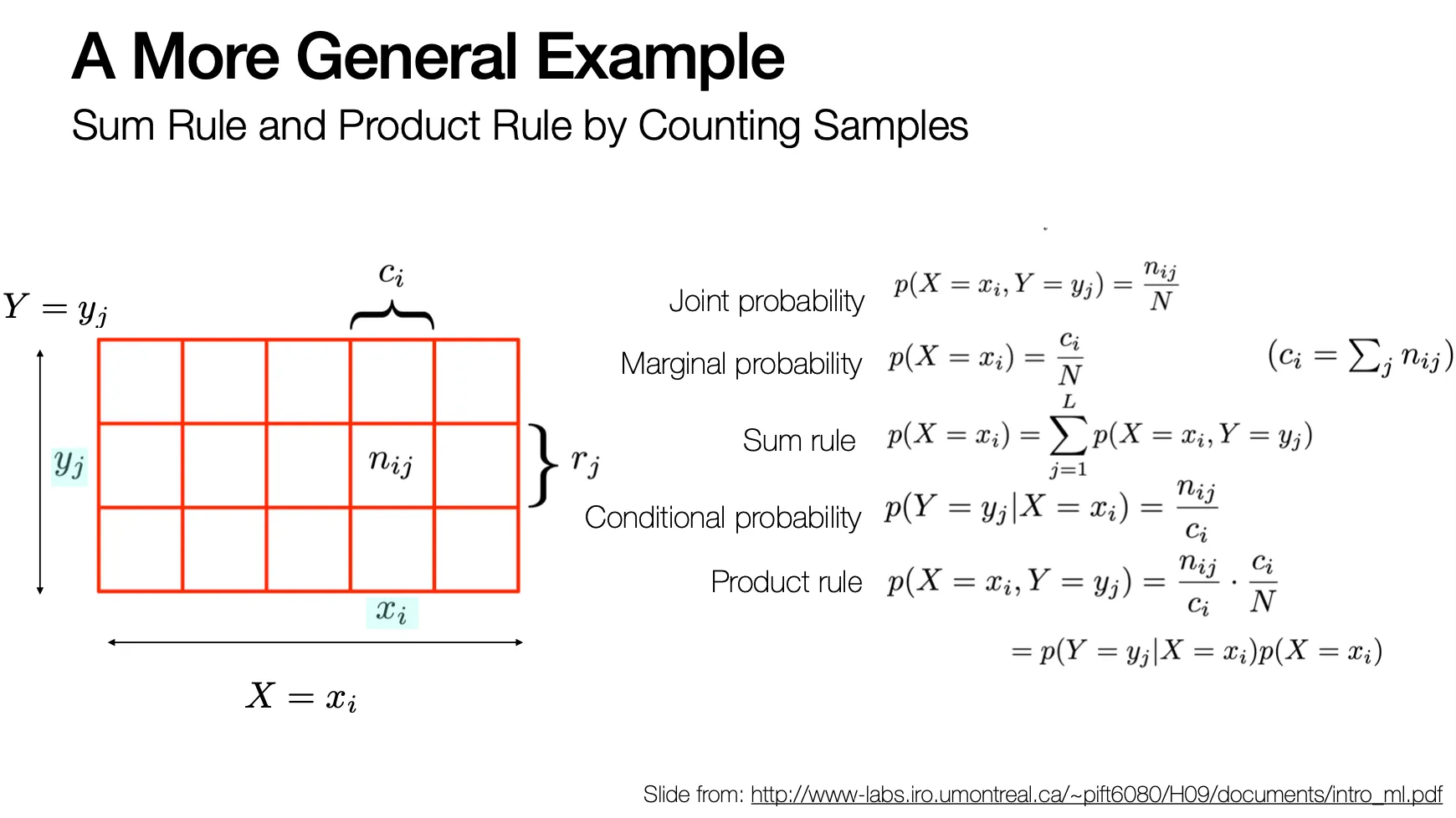
Bayes’ Theorem
•
Product Rule 과 symmetry property 로 인해 유도됨
Independence in Probability Theory
•
두 event , 가 independent 한 것은 다음과 동치임
•
Bayes’ Theorem 에 의해서 다음도 성립함
Probability Densities with Continuous Random Variables
Expectation
•
기댓값: 특정 값에 해당 값이 나올 확률을 곱해 summation (integral) 한 것
•
Discrete variable
•
Continuous variable
•
Conditional Expectation
Variance
Covariances
•
, 가 vector 인 경우에는 다음과 같이 matrix 형태로 covariance 가 구해짐
Gaussian (Normal) Distribution
•
Multivariate Gaussian 은 다음과 같이 표현됨
Bayesian Probabilities
•
데이터가 나온 분포에 대한 parameter 의 특성에 대한 inference 를 하는 것을 prior 라 함
◦
prior:
•
Obeservation 가 특정 prior 에 의해 나왔을 확률 는 likelihood 라고 함
◦
likelihood:
•
데이터로부터 특정 prior 가 나왔을 확률을 posterior 라고 함
◦
posterior:
•
이고, 는 normalized term 으로 볼 수 있음
Probabilities vs. Likelihoods
•
Probability: 고정된 distribution 의 밑면적
•
Likelihood: 특정 데이터가 변할 수 있는 distribution 에서 나올 수 있는 확률 (-axis value)
Information Theory
•
정보 는 라는 관찰을 통해서 얻을 수 있는 정보의 양을 의미함
•
일반적으로 작을수록 의미있는 정보이기 때문에 가 큼
•
두 독립적인 관찰에 대해서 가 성립함
•
통계적으로 독립인 두 사건 에 대해서
•
위 세 관계를 만족시키기 위해 를 의 형태로 설계함
•
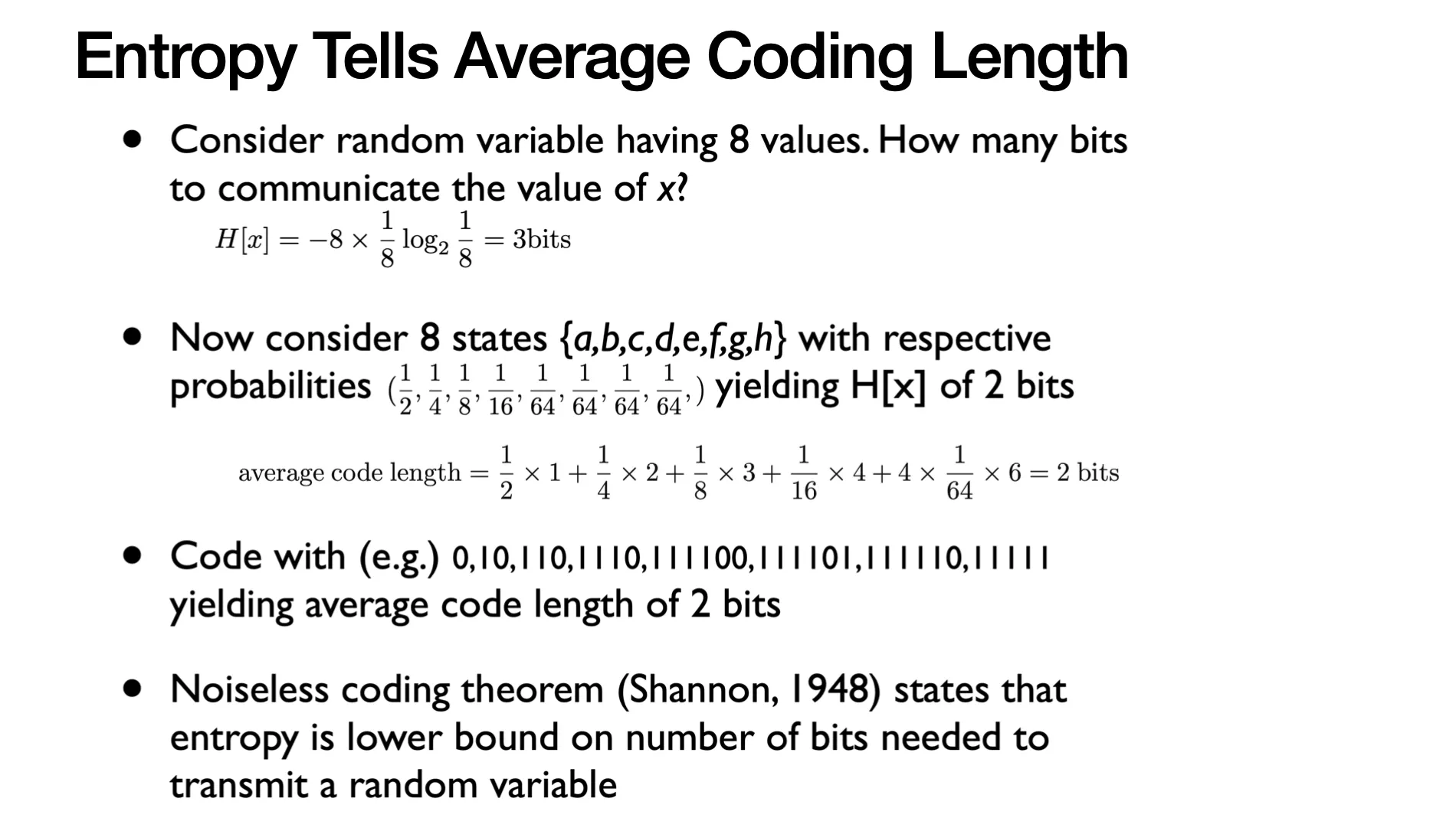
Entropy 는 확률변수 가 전해주는 정보의 총량으로 다음과 같음
◦
Entropy 는 average coding length 를 알려줌 (lower bound on number of bits needed to transmit a random variable) → average 가 가장 작은 encoding 을 사용하는 것이 좋겠죠?!
Kullback-Leibler (KL) Divergence
•
True distribution 대신에 esimation 를 사용했을 때 얻는 추가적인 정보량
•
두 확률분포 와 의 차이를 계산할 수 있는 지표 (추가 정보량이 작으면 분포가 비슷하다는 것임)
•
앞의 항목을 Cross-Entropy 라고 하고 뒤의 항목은 앞서의 의 Entropy 임
•
•
(Jensen’s Inequality 로 증명 가능)
•
•
많은 AI 등에서 모르는 를 로 근사하여 구해냄
Mutual Information
•
두 확률변수 가 얼마나 independent 한지를 측정하는 지표
•
가 independent 하면
•
Mutual Dependence 는 아래와 같이 계산할 수도 있음
◦