Overview: Camera Projection
•
3D object 에 반사된 광원의 빛이 카메라로 들어가 이미지의 픽셀로 맺히게 됨.
•
3D 공간을 2D 공간으로 변형하면서 신기한 특성들이 보이게 됨.
◦
평형인 선들이 더 이상 평행이 아니고 한 점으로 모임. (Vanishing Point)
◦
정사각형이던 건물의 벽이 정사각형으로 보이지 않음.
Euclidean Geometry
•
Euclidean 의 의미
◦
두 점 간의 최소 거리는 두 점을 이은 직선의 거리
◦
어떠한 삼각형이던 내부 각의 합은
◦
수직인 두 직선의 각은
◦
평행인 두 직선은 절대 만나지 않음
What is Projective Geometry?
•
평행인 직선은 한 점에서 만나게 됨 (Vanishing Point)
•
원은 타원으로 보일 수 있음
•
직사각형은 평행사변형으로 보일 수 있음
•
각도, 거리, 거리의 비율은 유지되지 않음
Representing A 2D Point in 2D Euclidean Space
•
형태로 2차원 점을 나타낼 수 있음
Representing A 2D Point in
•
형태로 3차원의 선을 나타낼 수 있음. ( 과 만나는 점을 통해 선을 표현)
•
Projective Space
◦
→ 에 projection 했을 때의 위치가 동일하기 때문.
◦
은 정의 되어있지 않음 →
◦
은 에 있는 점을 의미함.
Projective Space
•
Homogenous coordinate 를 사용한 3-dim vectors 로 표현됨
•
은 정의되지 않음 →
•
Scale 만 다른 homogenous vecctor 는 equivalent 함
•
Projective space 에서 Euclidean 으로의 변환은 첫, 두 번째 항을 세 번째 항으로 나눠주면 됨
•
Inhomogenous coordinate 과는 다르게 무한대에 있는 점을 표현할 수 있음 (Ideal points 혹은 point at infinity 라고 함) → 굳이 여러 경우에서 finite, infinite (parallel, not parallel) 를 나눠가며 판단할 필요가 없음!!
Representing 2D Lines in Homogenous Coordinates
•
•
Line equation 에서 line 은 다음과 같이 표현됨
•
Homogenous coordinate 에서 line 은 로 표현됨
•
Line 위에 있는 점들은 다음과 같이 표현됨
Degree of Freedom(DoF)
•
Independent variable 의 수
•
Homogenous coordinate 의 DoF 는 2
The Line Joining Two Points
•
Homogenous coordinate 에서 두 점 , 을 지나는 직선은 두 점의 외적임
◦
→ 가 위에 있다-
◦
→ 가 위에 있다-
•
Cross product 의 계산
•
Cross product 는 skew-symmetric matrix 로 표현 가능함
◦
Matrix multiplication 으로 표현하는 것의 이점들을 가져갈 수 있음!
Intersection of Lines
•
,
•
,
◦
Infinity 에 있는 점을 교점으로 찾아줌! (실제로도 평행한 직선)
•
axis 의 vanishing point 는 , axis 의 vanishing point 는
◦
임의의 점 과 vanishing point 를 지나는 직선은 로, 이고 축과 평행인 직선이 나옴!
Ideal Points and Line at Infinity
•
Ideal points 는 의 형태로 표현이 됨
•
모든 ideal points 는 다음과 같은 Line at Infinity 위에 있음
◦
이기 때문에 위에 있다는 것을 보일 수 있음
Projective Transformation (Homography)
•
Geometry: transfomations 들에 대해서 invariant 한 특성에 대한 연구
•
2D Projective Geometry: transfomrations 들에 대해서 invariant 한 projective plane 의 특성에 대한 연구
•
Homography 란?
◦
가 한 직선 위에 있다면 도 한 직선 위에 있는, 에서 로 이어지는 invertible mapping (Colinearity)
◦
Projectivity == Colineation == Projective Transform == Homography 다 같은 용어
◦
Radial lens distortions 는 non-homography transformations 임
•
non-singular (invertible) matrix 는 homography 임!
◦
는 8 DoF 를 가짐 (up to scale)
◦
Central projection 이 한 예시 (중심점과 ray 를 잇고 원하는 plane 과 만나는 점으로 projection)
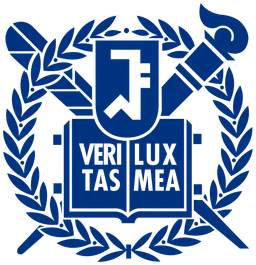
A Hierarchy of Transformations
•
Projective: 8 DoF (line → line, colinearity)
•
Affine: 6 DoF (parallel line → parallel line, parallelism)
•
Similarity: 4 DoF (Rotation with scale + Translation)
•
Euclidean: 3 DoF (Rotation + Translation)
How to Estimate Homography?
•
충분한 수의 corresponding points 가 존재해야 homography 를 찾을 수 있음!
•
Direct Linear Transform
◦
위 식을 여러 개의 쌍에 대해서 켜켜이 쌓아서 8 개의 줄이 생긴다면 는 8 DoF 이기 때문에 구해낼 수 있음 → Non-trivial solution 는 null space of A solution 이고 SVD 를 사용해 의 columns 들로 이 null space 를 구해낼 수 있음!
•
Over-determined Solution (4 noisy correspondences 보다 많은 데이터가 있는 경우)
◦
를 최소화하는 를 구하는 문제로 변형 ()
◦
A 를 SVD 해서 등장한 의 마지막 column vector (가장 eigenvalue 가 작은 eigenvector)
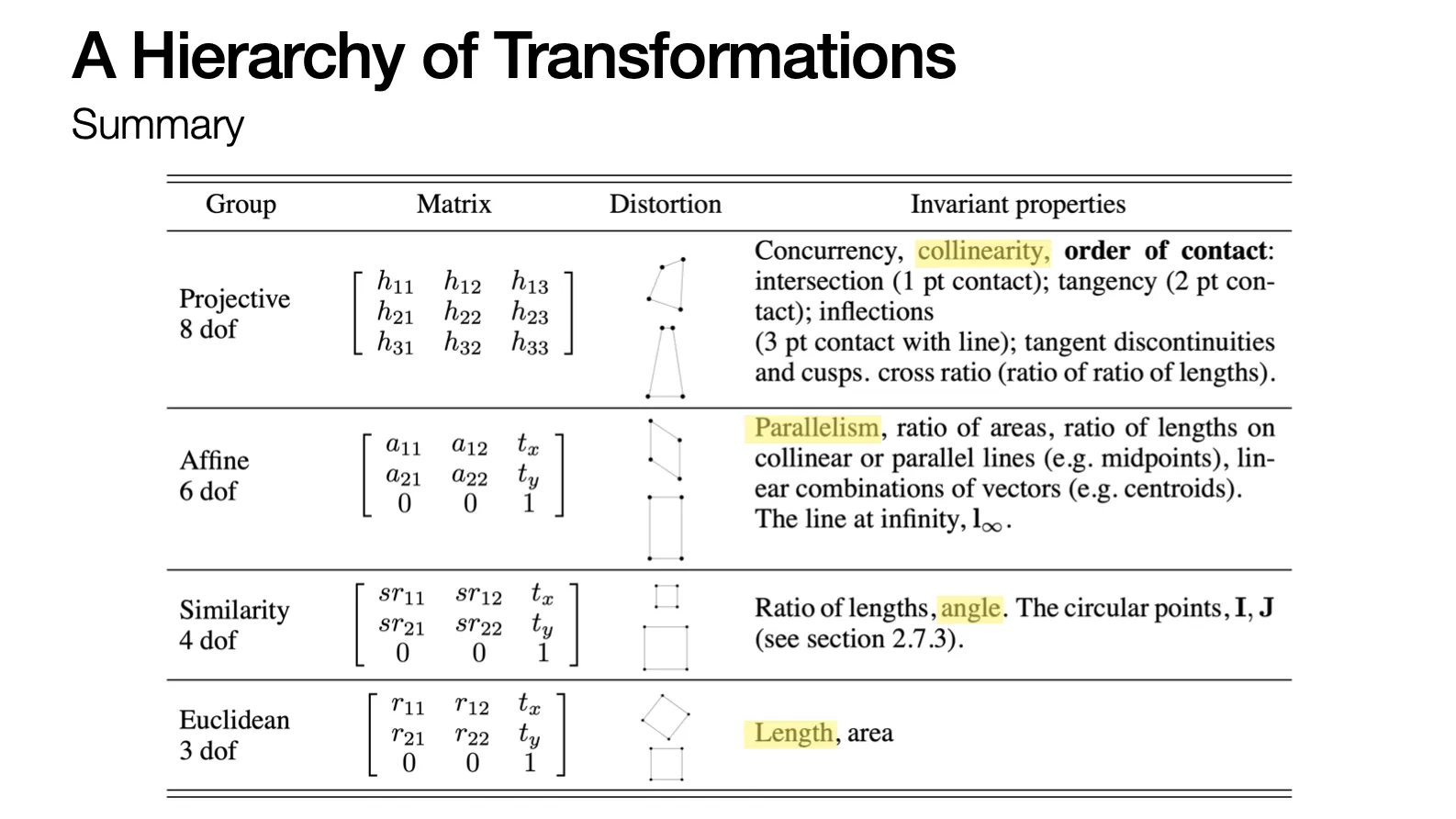
Homography - Practical Applications
•
Automatically Building Panoramic Images
•
Correspondence 는 SIFT descriptor 로 찾을 수 있음
•
Outlier 의 제거, Inlier 의 판단 등은 RANSAC 으로 진행!