Calibration Based Photometric Stereo


•
Calibration Sphere 는 이미 Surface Normal 을 알고 있는 물체임.
•
Sphere 같은 물질로 이루어진 다른 물체를 같은 Light Condition 에서 본 이미지가 주어졌을 때 동일한 Surface Normal 을 가지는 부분의 rightness 는 동일할 것이므로, 이를 통해 모르는 물체의 Surface Normal 을 구해낼 수 있음.
•
Calibration Sphere 를 다른 Lighting Condition 에서 K 장의 이미지를 얻어내고 각 이미지에서 같은 위치에 있는 점들의 brightness tuple 과 그에 해당하는 Surface Normal 값을 mapping 하는 look-up table 을 구성할 수 있음.
•
새로운 물체에 대해서 동일한 Lighting Condition 에서 K 장의 이미지를 얻어내고 각 이미지에서 같은 위치에 있는 점들의 brightness tuple 을 얻어내고 look-up table 에서 해당 tuple 과 대응되는 Surface Normal 값을 찾아 픽셀에 대응시킬 수 있음.
Shape from Shading
•
Shading 기반의 Single Image 를 활용하여 3D information 을 재구성하는 과정
•
Photometric Stereo 에서 살펴본 바와 같이 기본적으로 brightness 를 가지는 픽셀은 각도만을 알 수 있고 정확한 위치는 알 수 없기 때문에 surface normal 을 구하는데 ambiguity 가 존재하고, 결과적으로 Shape from Shading 은 Ill-posed problem 임.
•
이러한 Ill-Pose Problem 을 해결하기 위해 다음과 같은 가정을 도입함.
1.
Infinity Point Light Source ( is independent of geometry / depth)
2.
Infinity Camera Position (no distorsion)
3.
Shape is changing smoothly - Normal is changing smoothly
4.
Lambertian Model
Human Perception
•
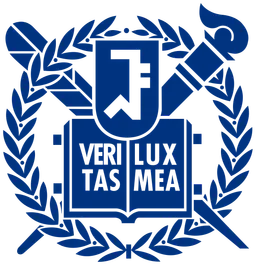
우리의 뇌는 Shading 으로부터 Shape 을 지각해낼 수 있음.
◦
우리의 뇌는 Light 이 위에서 오는 것에 익숙하고 biased 되어 있음.
◦
우리의 뇌는 Occluding Contour 에 biased 되어 있음.
•
중요한 점은, 인간은 Shading 으로 (맞을지는 모르지만…) 불완전한 정보를 예측해낼 수 있다는 것임.
Occluding Boundaries
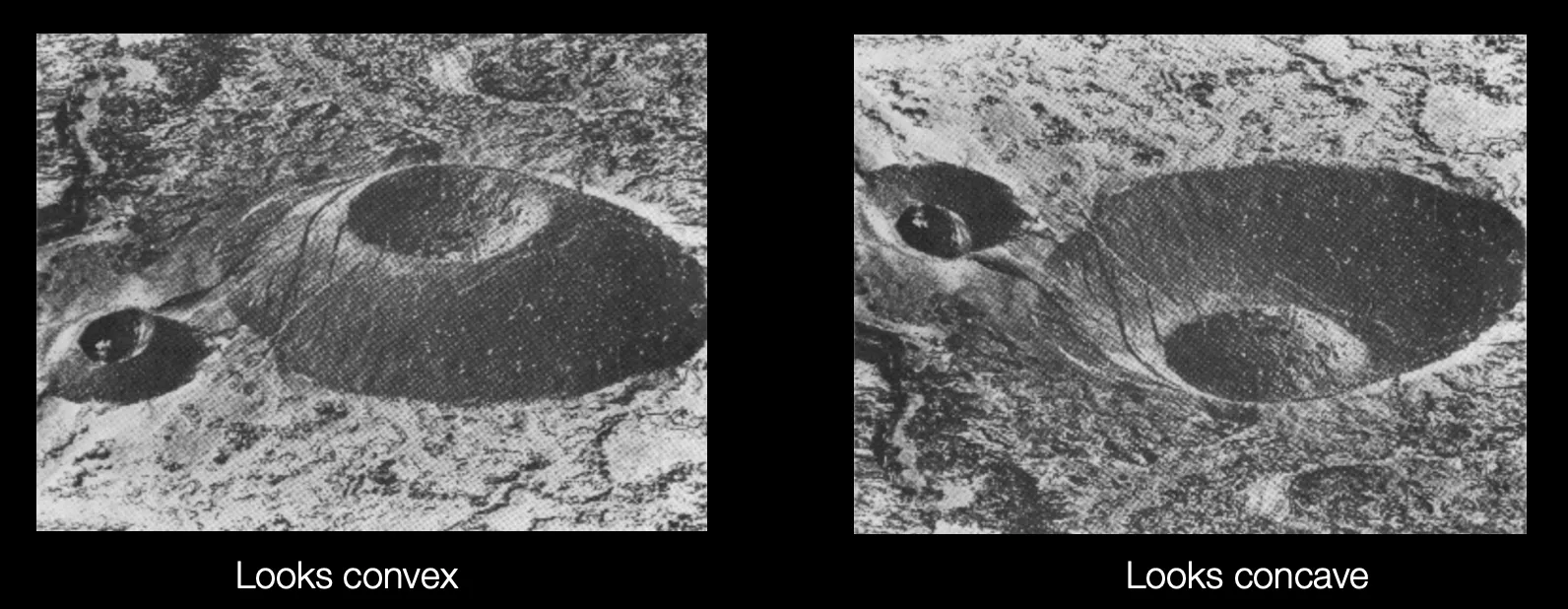
•
이미지 속 물체의 boundary 부분의 normal 은 view direction () 과 tangential line () 모두에 수직인 방향임을 가정할 수 있음.
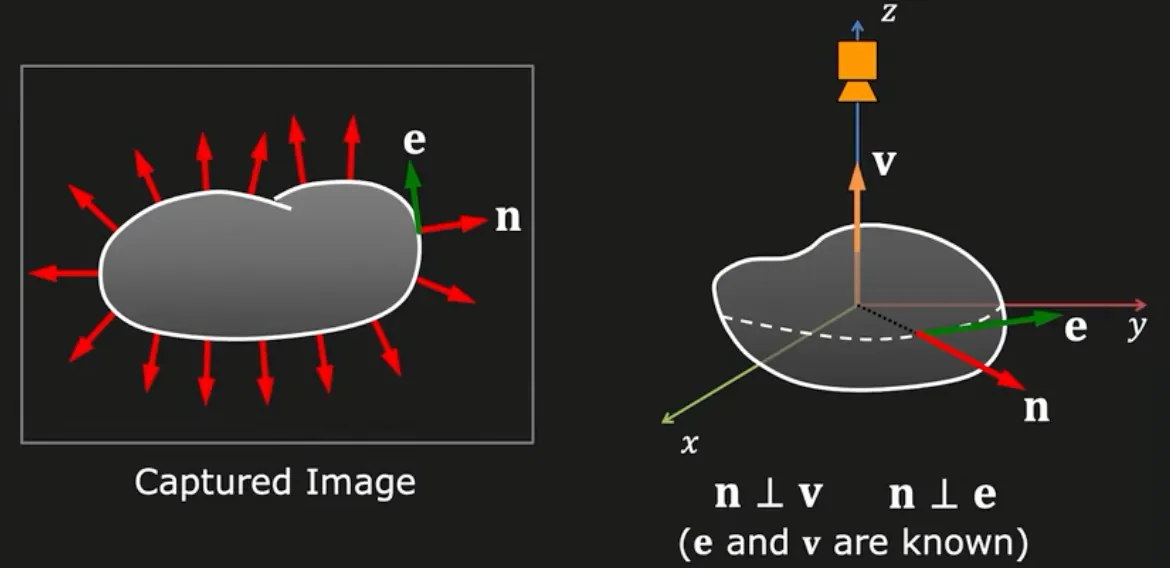
Stereographic Projection: fg Space
•
지점에서 surface normal vector 의 끝과 연결해 과 생성하는 교점을 로 하여 새롭게 parametrize 할 수 있음.
•
이러한 parametrization 이 좋은 이유는, 모든 가능한 normal vector 를 반지름이 2 인 원 위로 제한할 수 있기 때문임.
Reflectance Map
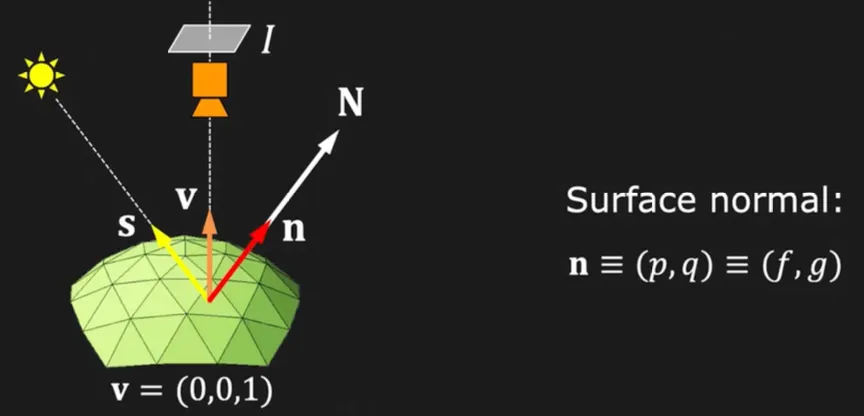
•
Photometric Stereo 에서 등장했던 것처럼 가 주어지면 를 알 수 있고 normal direction 을 알 수 있음. 여기에 source direction vector 까지 알면 를 구할 수 있음.
Image Irradiance Constraint
•
Image Intensity 는 Reflectance Map 과 동일해야 함.
•
위의 식을 최소화함을 통해 Reflectance Map 을 최적화할 수 있고, 최종적으로 및 normal direction 을 최적화할 수 있는 것임.
Smoothness Constraint
•
Object Surface 의 smoothness 를 가정하면 의 gradient values 가 천천히 변해야 함.
Shape from Shading + Numerical Shape from Shading
•
위 식을 최소화하는 모든 픽셀 점들에 대한 의 집합을 구해 각 픽셀에서의 Surface Normal 을 계산할 수 있음.
•
Numerical 하게는 각 픽셀 에 대해 error term 은 다음과 같이 계산이 가능함.
•
최종적인 error 는 다음과 같음.
•
이 때 이 를 최소화하면, 이 성립합.
◦
특정한 는 summation 에서 4 개의 항목에서 나타남.
◦
디테일을 알 필요는 없음…
•
이를 이용해 다음과 같이 update rule 을 세울 수 있음.
◦
Boundary 부분에서의 는 앞선 Occluding Boundary 세션에서 이미 구해놓은 값을 사용함.
◦
나머지 는 으로 initialize 한 뒤에 update 할 수 있음.
Shape from Surface Normals
•
Surface Normal 로 부터 3D Shape 을 만드는 과정은 3D Shape 를 Surface Normal 로 만드는 과정의 반대과정임.
•
3D Shape 를 Surface Normal 로 만들기 위해서는 depthmap 을 differentiate 해야하므로 반대과정은 intergration 을 하면 됨.
◦
부터 까지 갈 수 있는 임의의 경로로 intergration 을 하면 됨. (가능한 경로를 모두 찾아 값을 구하고 average 해도 됨.)
◦
더 좋은 방법은 가 성립해야 하므로 반대로, 이것이 성립하도록 optimization problem 을 설계하고 풀 수 있음.
◦
위 식은 Fast Fourier Transform 으로 효과적으로 풀 수 있다고 함. (디테일은 다루지 않음.)