Overview: Camera Projections
•
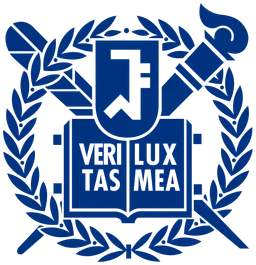
일반적으로 상은 Camera Center (Pinhole) 뒤 쪽에 focal length 만큼 거리의 위치에 생기지만, 편의를 위해서 Camera Center 앞 쪽 만큼 거리에 그리는 경우가 많음.
•
Image Plane 과 수직인 axis 를 Principle Axis 로, 그 교점을 Principle Point 라고 부름.
•
Camera Center 와 물체의 특정 위치를 잇는 선을 3D Ray 라고 하고 이는 Image Plane 에서 상으로 맺힘.
◦
같은 3D Ray 위에 있는 점은 Image Plane 에서 같은 위치에 상으로 맺힘.
•
2D Image Plane 위의 점 가 3D Point 와 대응된다면, 다음이 성립함.
◦
3D coordinates 에 scalar 가 곱해지더라도 동일한 2D Plane 상의 점에 대응됨을 알 수 있음.
Camera Intrinsic Parameters
•
3D Point 를 Homogeneous Coordinate 로 나타낸 것을 2D Point 를 Homogeneous Coordinate 로 나타낸 것으로 변환하기 위해서 위와 같이 focal length 를 기반으로 matrix 를 구성할 수 있음.
•
위 matrix 는 다음과 같이 표현할 수 있음.
◦
이 분리된 matrix 의 앞을 Intrinsic Parameter , 뒤를 Extrinsic Parameter 라고 부름.
•
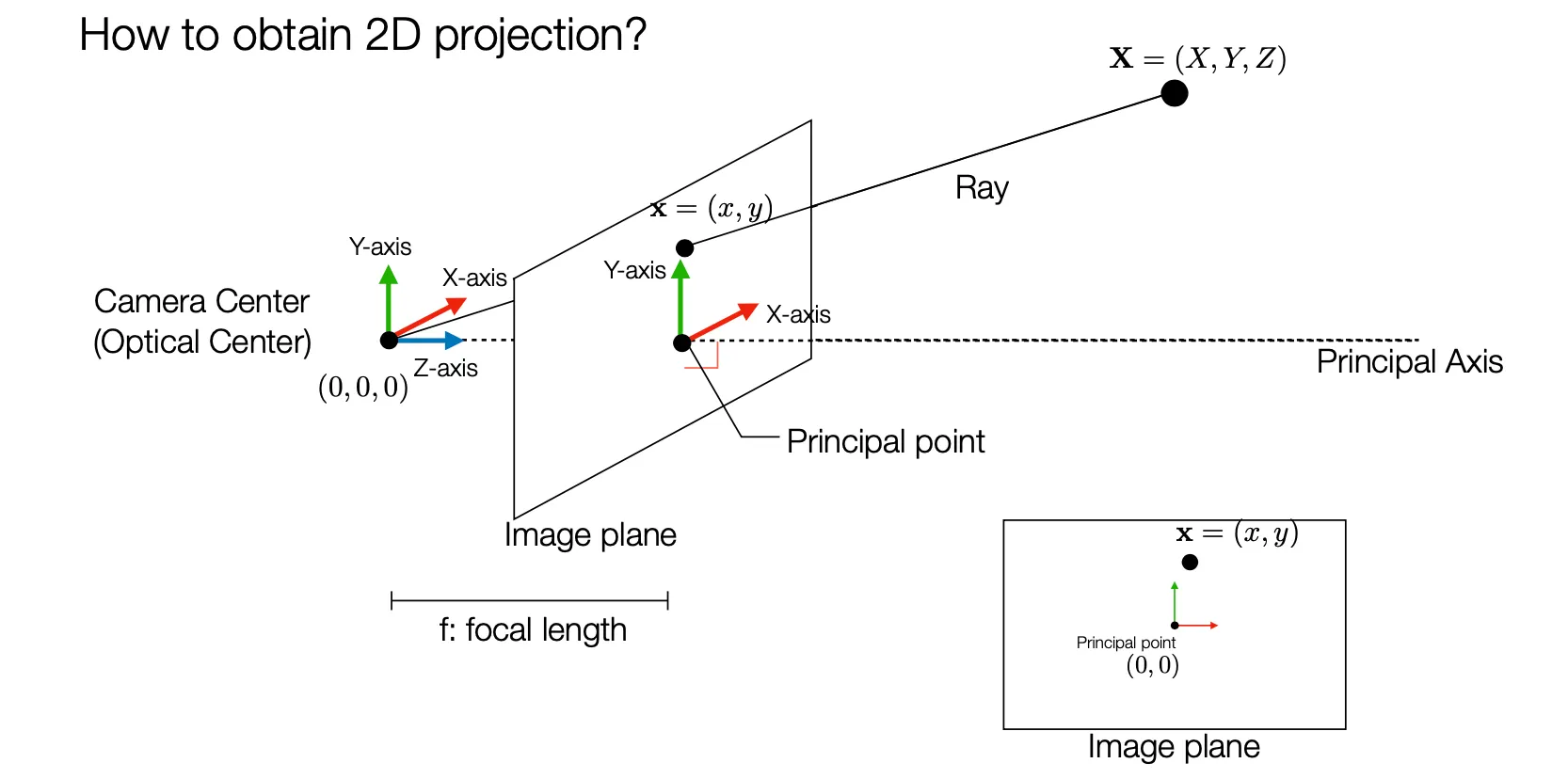
일반적으로 Image Plane 위의 origin 은 중심점이 아니라, 좌 하단의 점 등 corner point 이기 마련임. 이에 대한 보정은 다음과 같이 할 수 있음.
◦
는 중심점으로부터 Priniciple Point 까지의 보정에 필요한 offset 을 의미함.
◦
Intrinsic Parameter 에 항목이 추가됨.
•
3D Coordinate 의 측정 physical unit 을 pixel unit 으로 바꾸기 위해 다음과 같은 보정을 할 수 있음.
◦
◦
는 physical pixel 을 pixel unit 으로 바꾸기 위한 scaling factor 임.
◦
방향의 scaling factor 가 다른 것은 non-squared pixels 를 다루는 경우를 일반화 한 것임.
•
더 일반적으로는, pixel 이 perpendicular 하지 않은 경우 (e.g. 평행사변형 픽셀) 를 대응하기 위해 Skew Parameter 를 도입해 다음과 같이 Intrinsic Parameter 를 구축할 수 있음
Focal Length
•
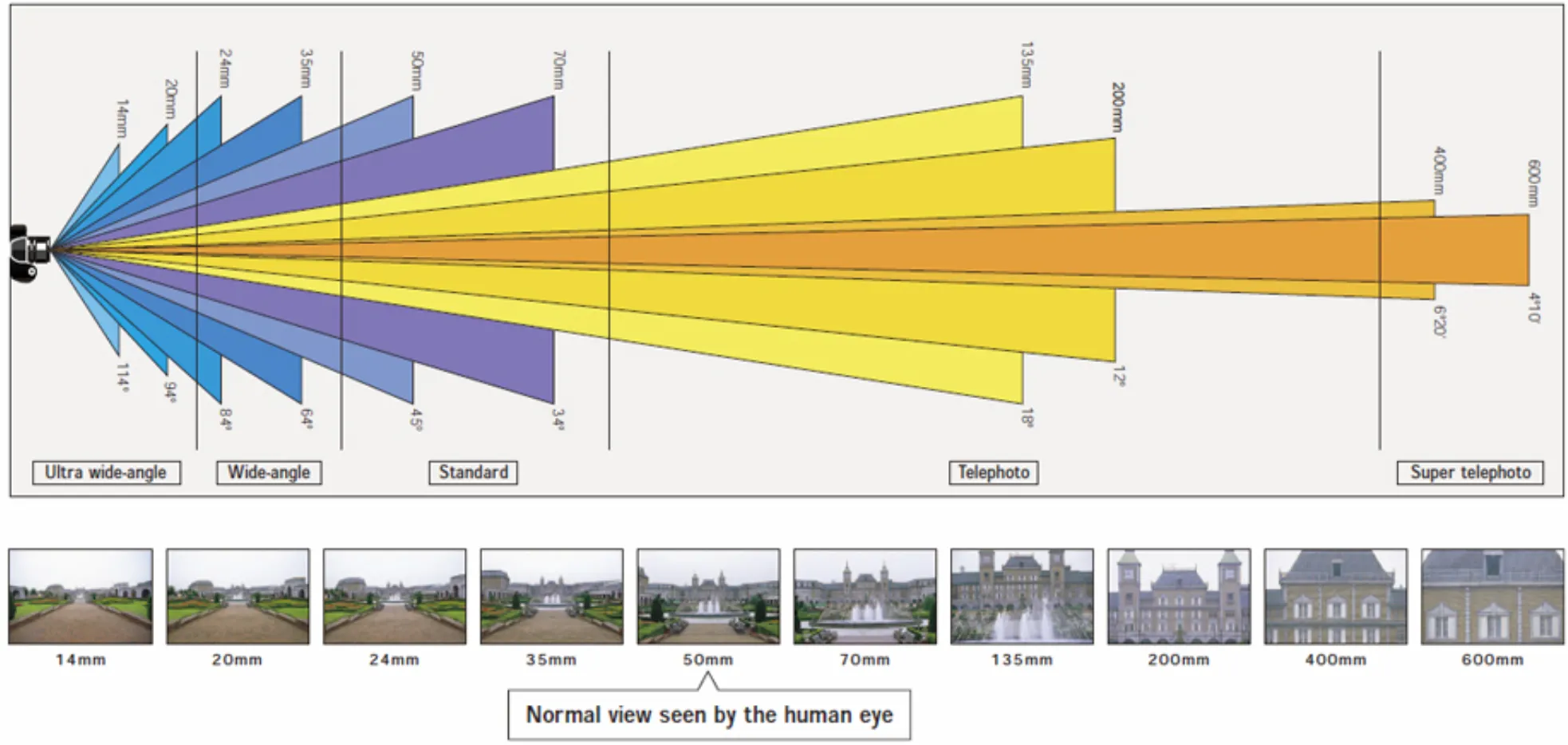
낮은 focal length 를 가지면 wide view 를 가지고 있지만, 확대의 비율이 적음.
◦
동일한 크기의 Image Plane 을 가정했을 때 볼 수 있는 범위가 넓음.
•
높은 focal length 를 가지면 narrow view 를 가지고 있지만, 확대의 비율이 큼.
◦
동일한 크기의 Image Plane 을 가정했을 때 볼 수 있는 범위가 좁음.
Extrinsic Parameters
•
간단한 상황에서는 Camera Center 를 으로 가정했지만, 실제에서는 그렇지 않음.
•
World Coordinate 를 Camer Coordinate 로 변환하는 과정이 Extrinsic Parameter 에 의해 진행됨.
•
이러한 좌표계 변환은 rotation matrix 과 translation 에 의해 다음과 같이 나타낼 수 있음.
•
위 변환을 이용해 기존의 변환된 Camera Center 가 이 되도록 하기 위해 다음과 같은 식을 세울 수 있음.
◦
이 식을 활용해 를 구할 수 있음.
•
최종적으로는 World Coordinate 를 Camera Coordinate 로 변환한 뒤에 Intrinsic Parameter 를 적용해 Camera System 을 구축함.
•
Camera Calibration 은 를 구하는 과정임.
Finite Projective Cameras
•
는 총 11DoF
◦
는 5DoF:
◦
은 3DoF: Roll, Pitch, Yaw
◦
는 3DoF:
•
Finite Projective Camera 는 다음과 같이 정의됨.
◦
모든 좌측 이 Non-Singular 인 matrix 는 Projective Camera 의 Camera Matrix 가 될 수 있음.
•
의 projection 인 은 의도대로 임.