
Intersection of Lines: Examples
•
두 선의 intersection 은 cross product 로 계산할 수 있음.
Intersection of Two Parallel Lines
•
두 선 의 intersection 은 cross product 로 계산할 수 있음.
◦
Ideal Point (Infinity) 에서 교차하는 것을 알 수 있음.
•
임의의 값을 가지는 은 모두 을 지남.
◦
이기 때문에, 임의의 값을 가지는 은 을 지나고 이 점에서 교차함을 알 수 있음.
Ideal Points and Line at Infinity
•
Ideal Point 는 일반적으로 다음과 같이 표현됨.
•
모든 Ideal Point 는 Line at Infinity 위에 있음.
◦
Proof:
Intersection of a Line and
•
두 선의 교차점은 cross product 로 구할 수 있음.
◦
와는 무관함. → 방향만 상관 있음. (사실, 방향의 비율만 상관 있는게, 어차피 비율이 같은 점은 Homogeneous Coordinate 에서 같은 점이기 때문임…)
The Beauty of Projective Space
•
두 distinct line 은 하나의 점에서 만남.
•
두 선이 평행인지 아닌지에 따라서 연산 및 판단 등에 구별을 두지 않음.
•
Finite Point 와 Ideal Point 를 동일한 형태로 표현할 수 있음.
Duality
•
선과 점에 대한 구별이 무의미한 연산 식들임.
◦
Duality Principle: 선과 점의 역할을 바꾸어도 식이 모두 성립함. (Indistinguishable)
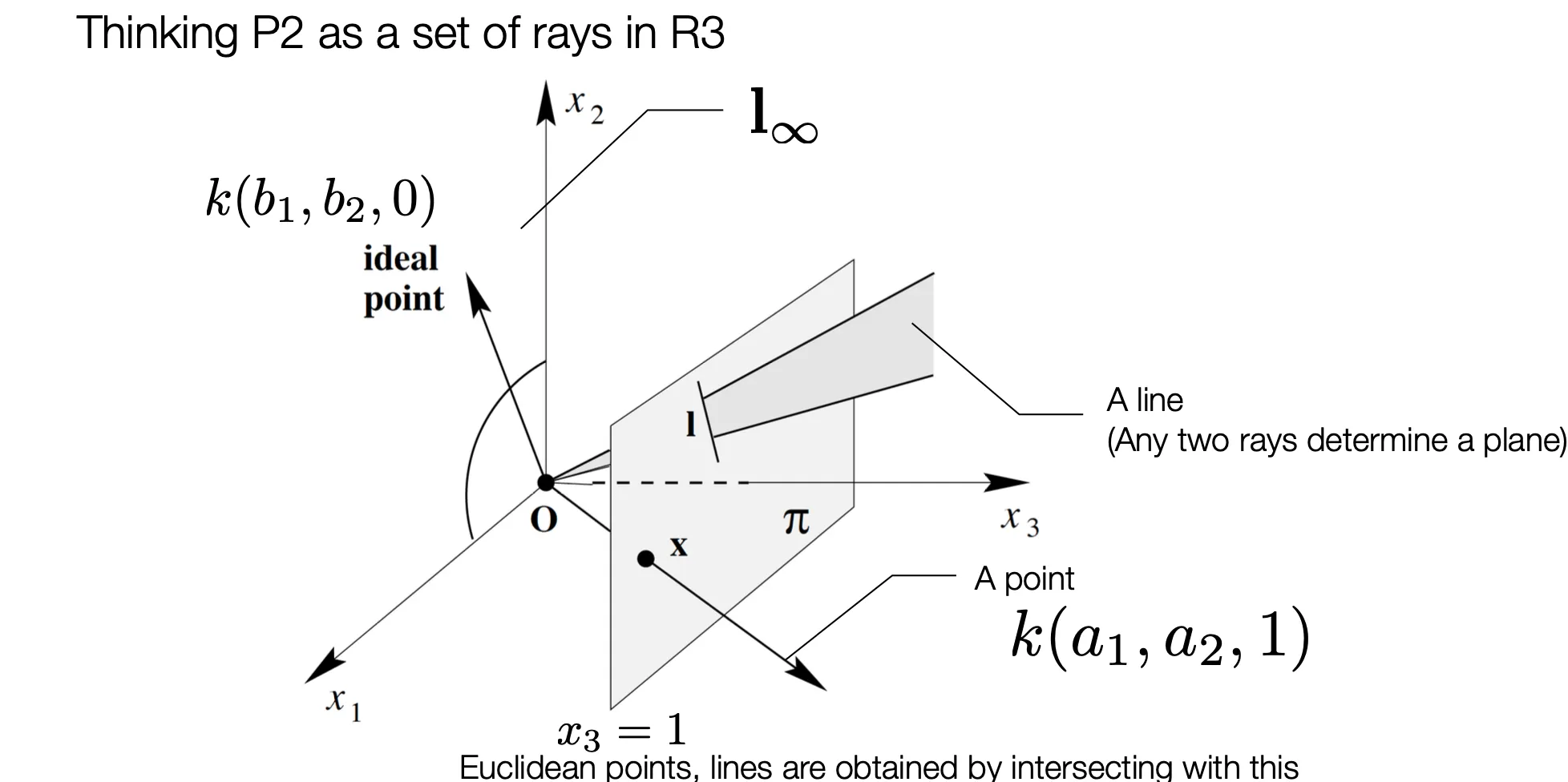
Relation between Projective Space and Camera Projection Model
•
Projection Space 상의 point 는 Euclidean Space 상의 ray 에 대응됨.
•
세 번째 항이 1 인 점은 Euclidean Space 상에서 인 plane 이자, Projection Space 에서는 전체 도메인임. (Image Plane)
•
Euclidean Space 에서 ray 상의 점들을 Image Plane 상으로 projection 을 하는 행위는 ray 상의 점들을 같은 점으로 변환시키는 행위가 되고, 곧 Euclidean Space 를 Projection Space 로 표현하는 과정임.
Conic
•
Homogeneous Coordinate 로 표현하기 위해 으로 변환할 수 있음.
•
위 식은 Matrix Multiplication form 으로 변환할 수 있음.
◦
Homogeneous Coordinate 에서 line equation 을 계수로 표현한 것과 같이, Conic 은 위 matrix form 의 가운데 matrix 로 나타냄.
◦
는 symmetric matrix.
◦
Homogeneous Coordinate 자체가 Up-to-Scale 이기 때문에 도 Up-to-Scale 임.
◦
는 여섯 개의 변수가 존재하지만, Up-to-Scale 이므로 5DoF 임.
◦
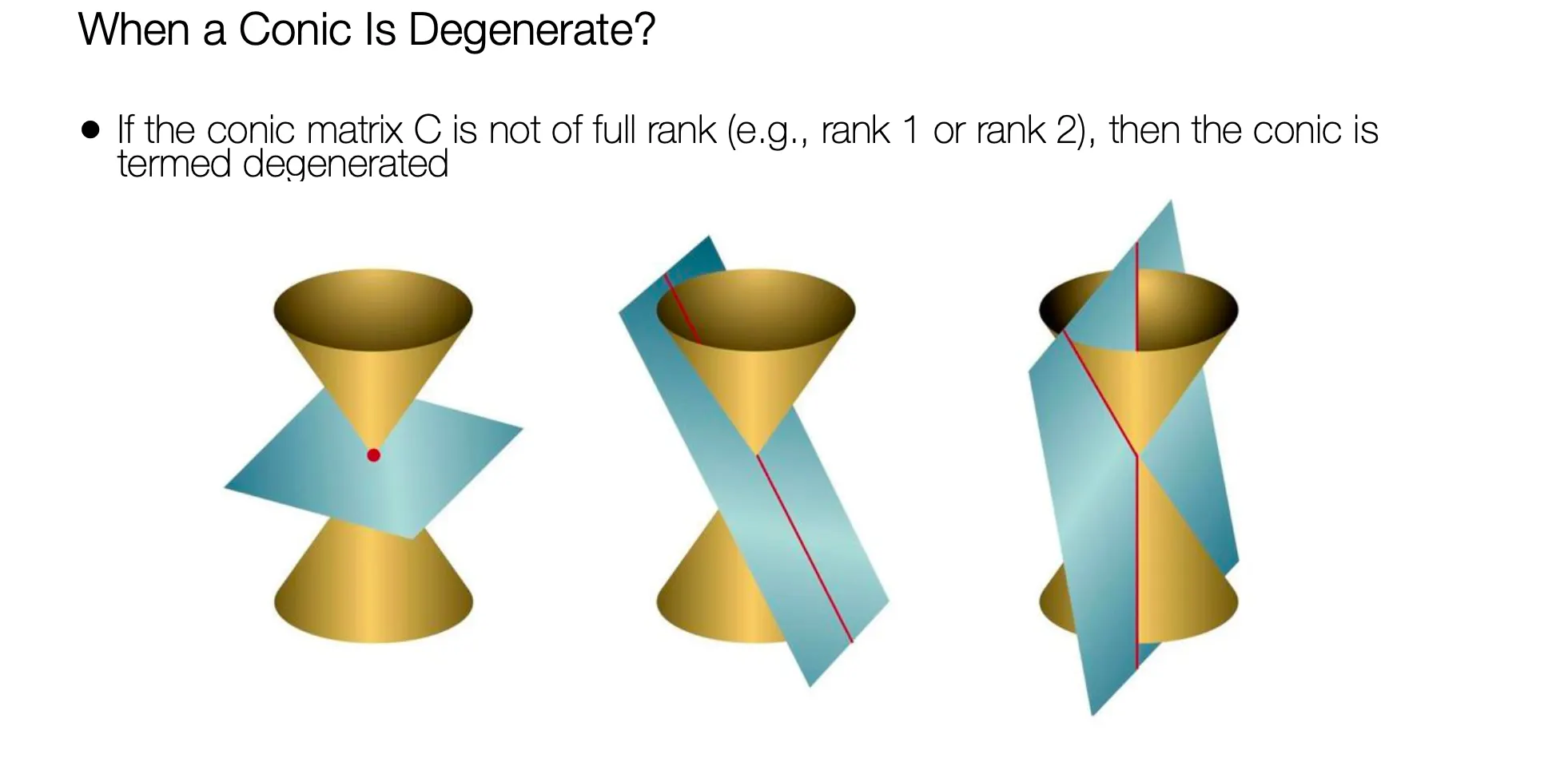
는 full rank 가 아닐 수도 있음. (degenerated case)
•
다섯 개의 점이 Conic Equation 의 다섯 변수를 결정함.
◦
SVD 를 이용해 을 만족하는 non-zero solution 를 찾을 수 있음.
Circle
•
Conic Equation 에서 이고 인 특수한 경우임.
◦
Up-to-Scale 에 의해 3DoF 가 됨.
Tangent Lines to Conics
•
Conic 위의 점 에서의 Tangent Line 은 다음과 같이 표현할 수 있음.
◦
가 unique 하다는 가정 하에서 다음과 같이 증명할 수 있음.
◦
만약 과 의 또 다른 교차점 가 존재한다면, 는 그냥 line 임. (degnerated case)
▪
이므로 다음이 성립함.
▪
즉, 와 사이를 잇는 직선 위 모든 점이 Conic Equation 을 만족함. → Line 이 Conic 이자, degenerated case 임.
Degenerate Conics
•
Two Intersecting Lines
◦
Homogeneous Coordinate 로는 두 선 에 대해 다음과 같음.
▪
증명은 다음과 같음.
•
위의 점 에 대해서 이기 때문에
•
위의 점 에 대해서 이기 때문에
•
A Point
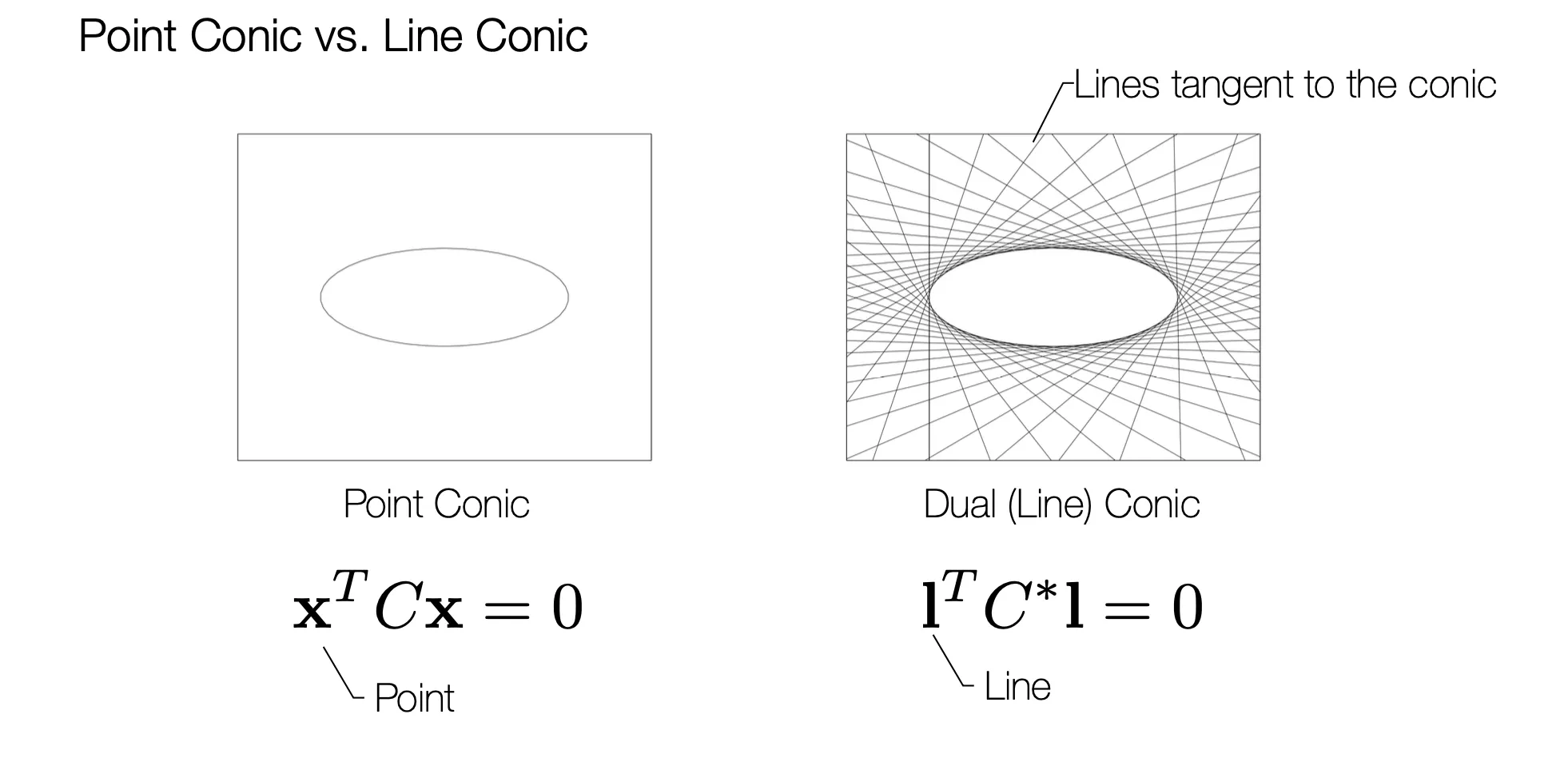
Dual Conic
•
Homogeneous Coordinate 는 기본적으로 Duality 가 존재함.
•
Conic Equation 을 만족하는 3차원 벡터가 Point 일 것이나 Line 일 것이냐에 따라서 Point Conic 과 Dual Conic 으로 나누어짐.
•
일반적으로 Line Conic 의 와 Dual Conic 의 은 inverse 관계임. (동일한 것을 표현하기 위해)