Epipolar Geometry
•
두 개의 view 에 대한 Projective Geometry 를 연구하는 분야.
◦
3D Structure 나 Scene 이 아니라, 두 Camera Pose 에 관한 것임.
•
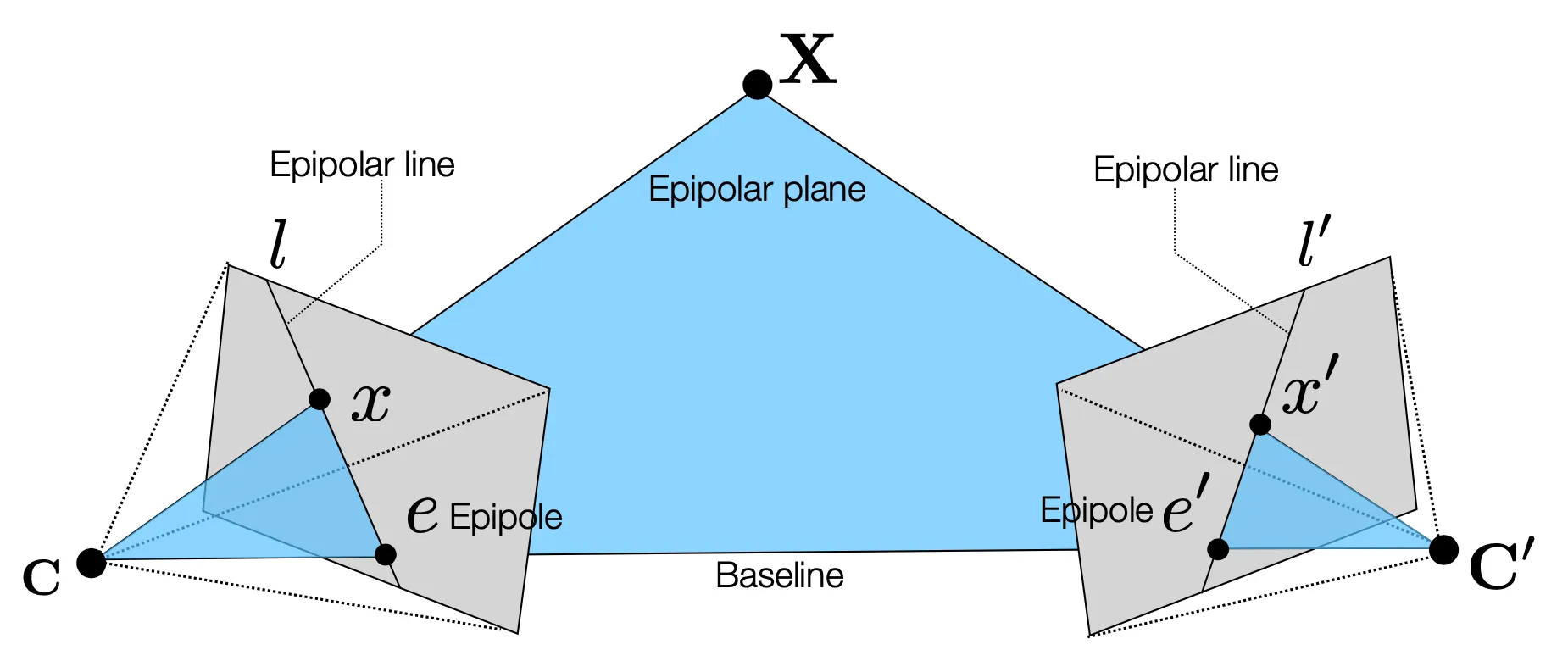
Epipolar Geometry 의 각 요소에 대한 설명 ?
◦
: 3D 의 한 점 가 Camera Center 에 대해 Image Plane 위에 projection 된 점
◦
: 3D 의 한 점 가 Camera Center 에 대해 Image Plane 위에 projection 된 점
◦
Baseline: 두 Camera Center 를 잇는 선
◦
Epipole : Baseline 과 Image Plane 의 교점
◦
Epipolar Plane: 이 동시에 놓여있는 평면
▪
세 점 을 지나는 평면을 먼저 정의하면, 각 점 은 그 평면 위에 놓인 선 위에 존재하는 점이기 때문에 해당 평면 위에 있음
◦
Epipolar Line: Epipolar Plane 과 각 Image Plane 의 교선, (혹은 Back-Projected Ray 의 다른 Image Plane 에 대한 projection)
▪
Epipole 은 Epipolar Plane 위의 점 에 대한 projection 으로 볼 수 있기 때문에 Epipolar Line 은 항상 Epipole 을 포함함.
Properties of Epipolar Lines
•
Original 3D point 가 변해도 Baseline 은 변하지 않음.
◦
Baseline 은 Camera Center 를 잇는 선이기 때문에 Camera Center 가 동일하면 변하지 않음.
•
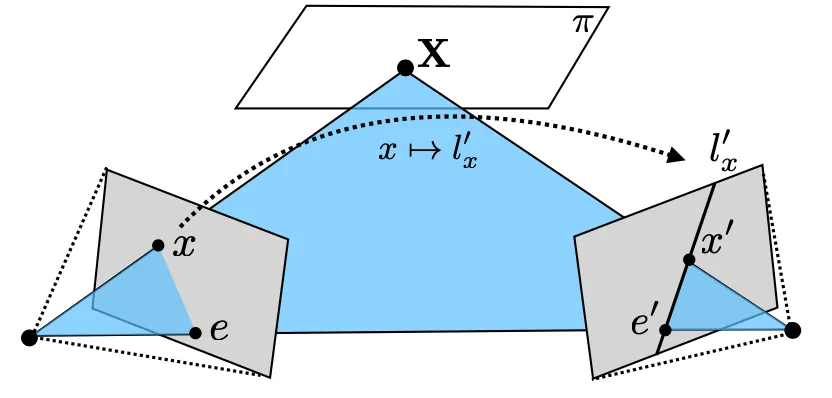
Original 3D point 의 각 Image Plane 으로의 projection 은 항상 Epipolar Line 위에 있음.
◦
Epipolar Line 은 Back-Projected Ray 의 다른 Image Plane 위로의 projection 이고, 는 Back-Projected Ray 위에 있기 떄문임.
◦
이것은 두 이미지 상의 Corresponding Point 가 서로의 Epipolar Line 위에 있다는 것을 뜻하며, Corresponding Point 를 찾는데 좋은 constraint 로 사용될 수 있는 중요한 특성임.
•
Original 3D point 의 변화에 따라서 Epipolar Plane 은 Baseline 을 중심으로 회전함.
◦
Epipolar Plane 은 항상 Baseline 을 포함하고 있기 때문임.
•
Original 3D point 의 변화에도 불구하고 Epipolar Line 은 항상 동일한 Epipole 을 지남. → 가 바뀜에 따라서 나타날 수 있는 여러 Epipolar Line 의 교점으로 볼 수 있음.
◦
Original 3D point 가 변해도 Baseline 은 변하지 않기 때문임.
Fundamental Matrix
•
Epipolar Geometry 에서 한 이미지 위의 점에서 다른 이미지 위의 Epipolar Line 으로 대응하는 Rank 2 Mat rix 가 존재함.
•
은 위에, 는 위에 있기 때문에 다음이 성립함.
Geometric Derivation of Fundamental Matrix
•
를 지나는 plane 하나를 생각하면 Camera Center 를 공유하는 두 Plane 에 대한 Transformation 두 개를 생각할 수 있고 이 둘은 모두 Homography 이며 결론적으로 을 두 번의 Homography 연산이자, 또 다른 Homography 로 생각할 수 있음.
•
Epipolar Line 은 Epipole 과 Corresponding Point 를 지나는 직선이므로 다음과 같은 식을 세울 수 있음.
◦
은 Skew Symmetric Matrix 이고, 는 Homography 이기 때문에 도 Matrix 가 됨.
◦
이기 때문에 Rank 2 이고 Homography 는 Rank 3 (Invertible) 이기 때문에 이들의 Multiplication 인 는 Rank 2 가 됨.
◦
는 9 개의 variable 이 존재하지만 (9DoF) Up-to-Scale (-1DoF) 이고 의 constraint 가 존재하여 (-1DoF) 최종적으로 7DoF 임.
Geometric Meaning oF Rank 2 of
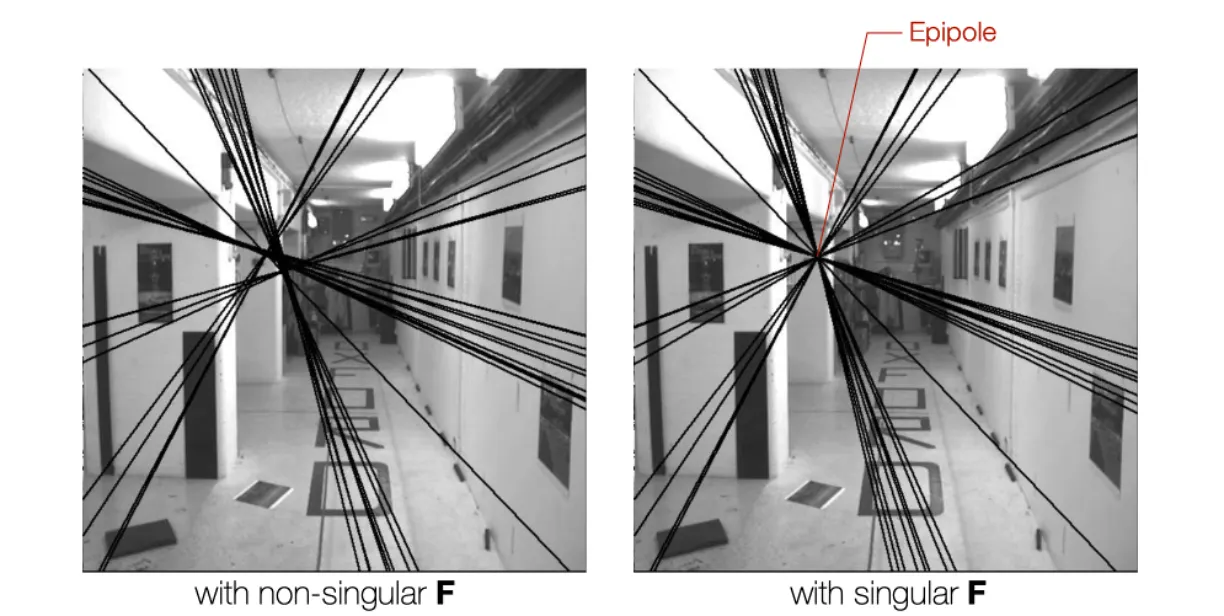
•
Full Rank 인 가 계산되어 사용하면 Epopolar Line 이 하나의 교점을 가지지 않음.
•
에서 point 는 2DoF 이기 때문에 가 Full Rank 이면 도 2DoF 가 되어버림. 위 그림으로 예시를 들면, 선의 절편과 기울기 모두에 자유도가 있는 좌측의 그림임. 즉 는 Full Rank 일 수 없음.
•
Epipolar Line 위의 다른 점 에 대해서 에 대응되는 다른 Image Plane 의 Epipolar Line 또한 에 대응되는 Epipolar Line 과 동일해야 함. 이 때 가 invertible 하면 1-1 mapping 만 되기 때문에 는 Non-Invertible 하고 Full Rank 일 수 없음.
Algebraic Derivation of Fundamental Matrix
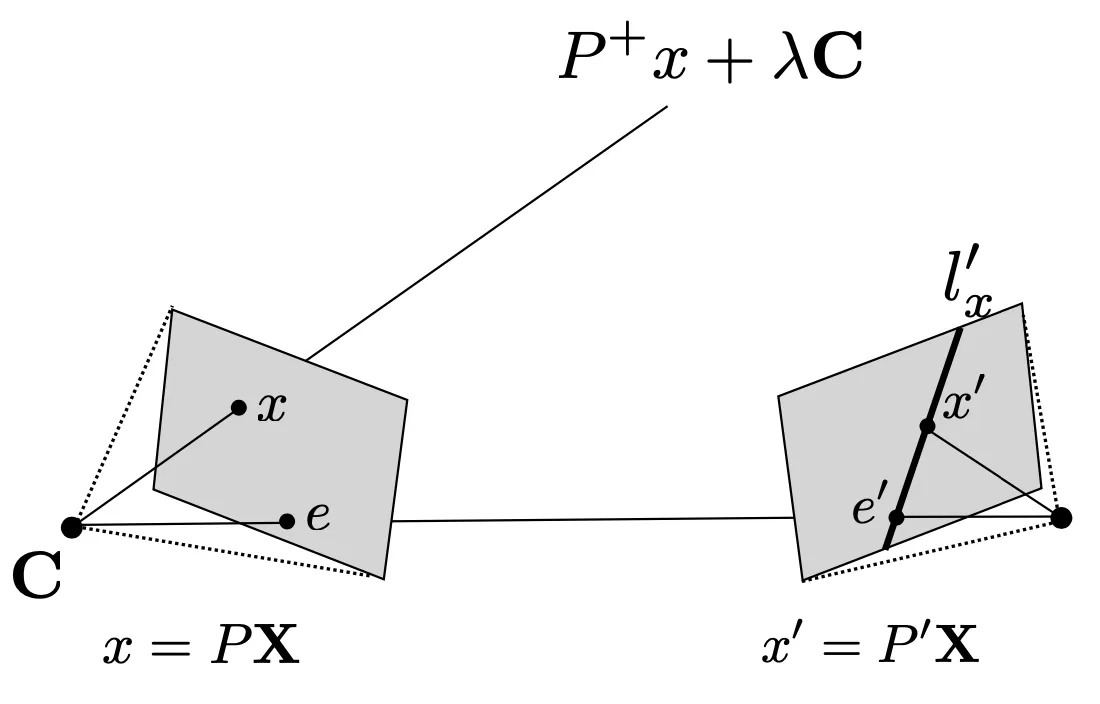
•
Camera Center 와 Image Plane 위의 점 에 대한 Back-Projected Ray 위의 점은 다음과 같이 표현할 수 있음.
◦
는 Camera Center 와 Image Plane 에 대한 projection 이고, 는 에 대한 pseudo-inverse 임.
•
와 일 때의 Ray 위의 점인 의 다른 Image Plane 에 대한 projection 은 모두 그 Epipolar Line 위에 있고 다음과 같이 표현할 수 있음.
◦
은 Camera Center 과 다른 Image Plane 에 대한 projection 임.
Fundamental Matrix
•
일반성을 잃지 않고 한 Camera 의 Center 를 원점으로, Rotation Matrix 를 로 생각할 수 있음.
◦
이렇게 가정하면, 의 pseudo inversere 는 가 됨.
◦
Epipole 들은 각 Camera Center 를 서로의 Image Plane 에 projection 한 점이므로 다음과 같음.
•
이러한 가정 속에서 Fundamental Matrix 는 다음과 같이 표현할 수 있음.
◦
마지막 변환은 다음과 같은 일반적인 관계에 의해서 성립함.
▪
는 Cofactor Matrix 로 이 invertible 하면 임. 많은 경우에 이 Up-to-Scale 하기 때문에 이기도 함.
▪
구체적으로 다루지는 않음.
◦
추가로, 이 Rotational Matrix 일 경우 다음이 성립하여, 최종적으로 를 변환할 수 있음.
▪
마찬가지로, 구체적으로 다루지는 않음.
•
결국 을 만을 사용하여 표현할 수 있음!
Fundametal Matrix : Summary
•
는 Rank 2 Homogeneous Matrix (7DoF)
•
Epipolar Lines:
•
Epipole 에 대응되는 Epipolar Line:
◦
모든 Epipolar Line 은 Epipole 을 지나기 때문에 모든 에 대해 이고, 임을 알 수 있음.
Epipolar Constraints for Corresponding Points
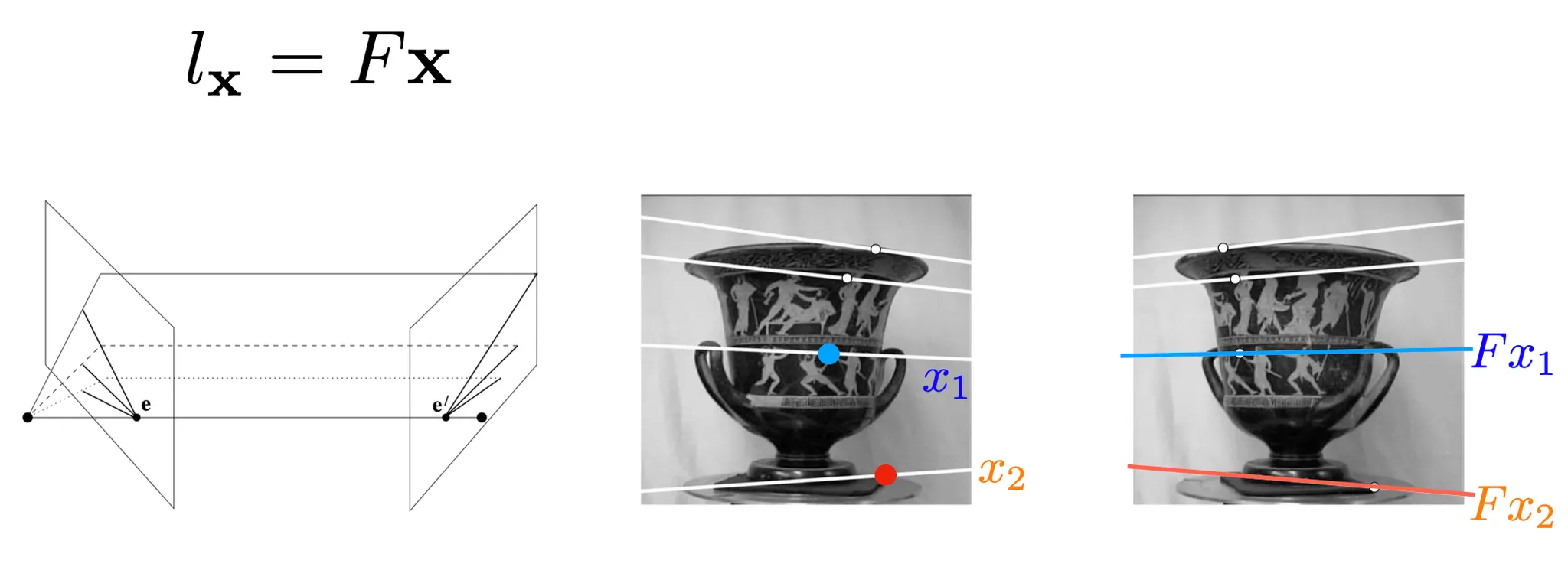
•
특정 점과 대응되는 다른 이미지 위의 점은 해당 점에서 다른 이미지의 Epipolar Line 을 계산하여 그 Epipolar Line 위에 있음. → 이를 Epipolar Constraint 라고 함.
•
즉, 특정 점의 Corresponding Point 를 찾기 위해서는 Epipolar Line 을 찾고 그 위에서만 찾으면 됨.
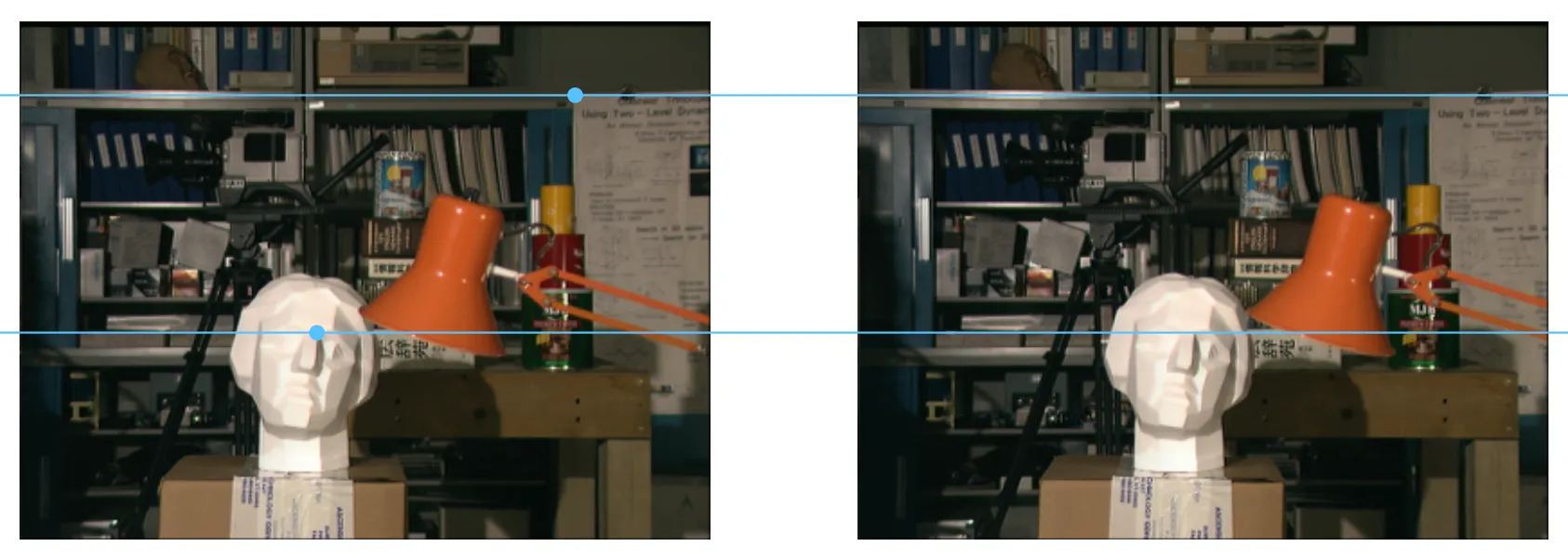
Pure Translation
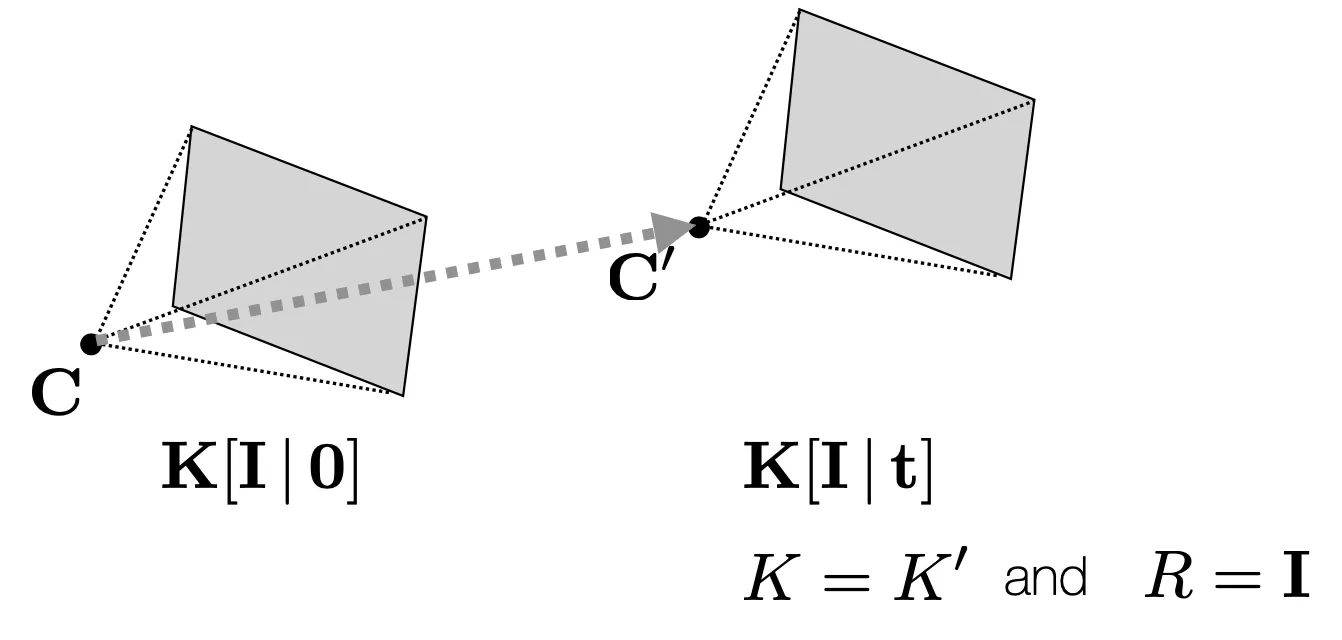
•
두 Camera Center 사이에 Pure Translation 만 있는 경우는 일반성을 잃지 않고 다음과 같은 상황을 고려할 수 있음.
•
이러한 경우에는 특별하게 가 계산될 수 있음.
•
X-Axis 에 평행하게 Camera 를 움직인 경우는 다음과 같이 특별하게 계산할 수 있음.
◦
는 Upper Triangluar Matrix 임을 잊지 말자!
◦
이기 때문에 다음과 같이 표현할 수 있음.
◦
의 constraint 는 다음과 같이 변형됨.
▪
동일한 축 위의 점에 Corresponding Point 가 존재함. → Stereo Matching Problem