Overview: Camera Projections
•
광원의 빛이 물체에 반사되어 카메라의 렌즈를 통과하여 CCD 센서에 도달하여 디지털 신호로 변환됨.
•
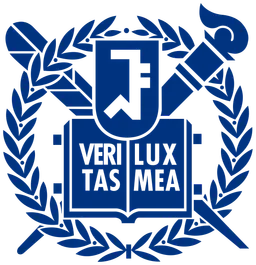
Camera System: Scene + Pinhole (Camera Center) + 2D Plane (Screen)
•
3D Projection (Capturing Scene) 은 3D Scene 을 2D Image 로 projection 하는 과정임.
What is Projective Transformations?
•
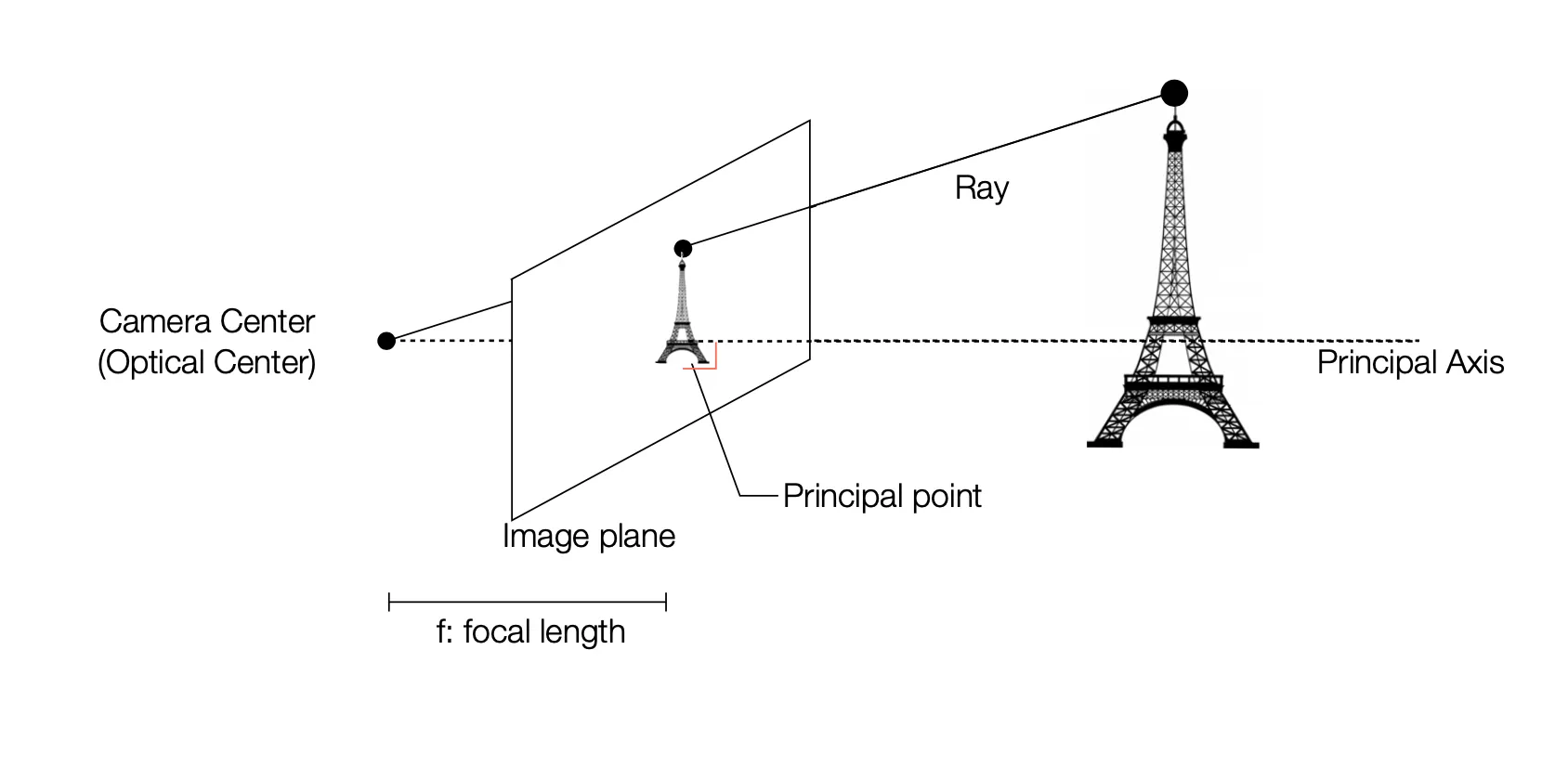
위 그림은 일반적인 이미지이지만, 다음과 같은 특이점이 있음.
◦
실제로는 평행한 선이 이미지 상에서는 평행하지 않고, 유한한 점에서 만남.
◦
실제로는 직사각형인 창문이 이미지 상에서는 평행사변형임.
◦
실제로는 원인 시계가 이미지 상에서는 타원임.
Euclidean Geometry ?!
•
3D Real World Space
•
세부적인 특징들 ?
◦
두 점 사이의 가장 가까운 거리는 직선임.
◦
삼각형의 내각의 크기의 합은 임.
◦
수직인 직선은 를 이룸.
◦
평행한 직선은 만나지 않음.
•
Euclidean Geometry 에서는 “Infinity” 가 정의될 수 없는 큰 단점이 있음!
◦
e.g. 평행한 두 선의 교점을 일반적인 방법과 동일하게 표현할 수 없음…
Projective Geometry !!
•
Euclidean + Infinity Points
•
세부적인 특징들 ?
◦
평행한 선이 유한한 점에서 만남. → Homogeneous Coordinate 로 확인할 수 있음.
◦
원이 타원으로 나타날 수 있음.
◦
직사각형이 평행사변형으로 나타날 수 있음.
◦
각, 길이, 길이의 비율이 유지되지 않음.
Representing A 2D Point in 2D Euclidean Space
•
Inhomogeneous Coordinate
•
Homogenenous Coordinate
◦
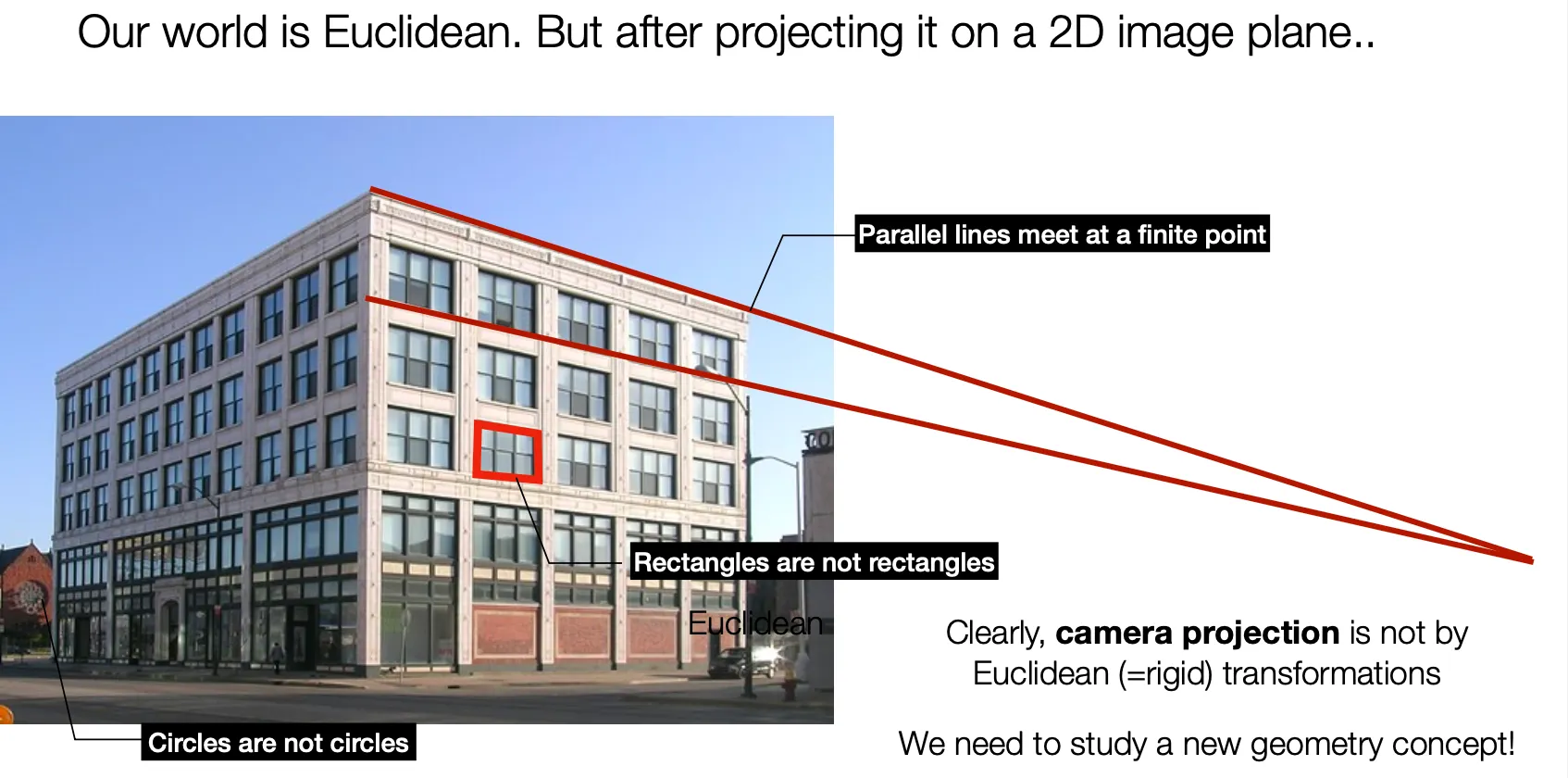
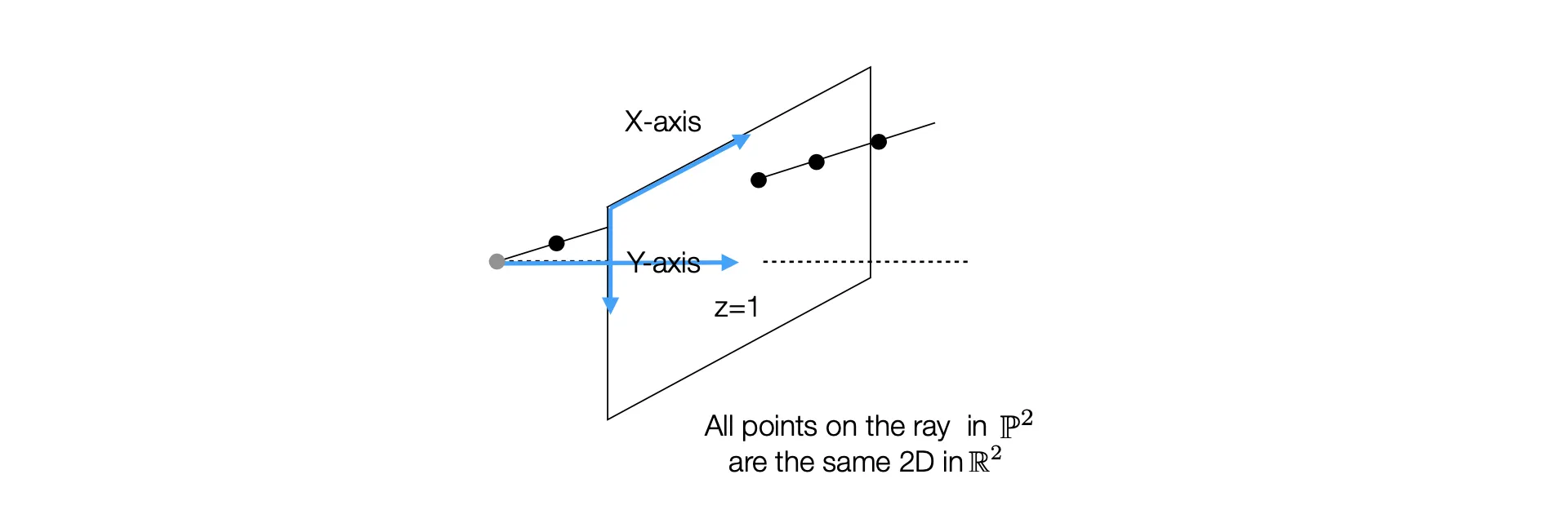
2D Euclidean Space 의 2D Point 를 3-dimensional vector 로 표현함.
◦
각 항목에 가 곱해져도 같은 점을 의미함. (Up-To-Scale)
▪
마지막 차원의 1 은 인 Image Plane 과 ray 와의 교점을 나머지 두 차원 로 표현한 방식이기 때문에 주어짐.
▪
각 항목에 가 곱해지는 것은 3차원 좌표 상에서는 Camera Center 로 이어지는 ray 상의 모든 점을 의미하지만, Homogeneous Coordinate 에서는 모두 같은 점 (Projected 2D Point) 을 의미함. → Homogeneous Coordinate 가 Projective Geometry 를 표현하는 이유임.
◦
은 정의되지 않음.
◦
Inhomogeneous Coordinate 에서 표현할 수 없는 Infinity 는 하나의 차원이 추가된 “redundancy” 로 인해 Homogeneous Coordinate 에서 다음과 같이 표현할 수 있음. (Ideal Points)
▪
Ideal Point 를 Inhomogeneous Coordinate 로 변환하기 위해서는 zero-division 을 거쳐야 하고, 의도했던 대로 Infinity 를 나타냄을 알 수 있음.
Representing A 2D Lines in Homogenous Coordinates
•
Inhomogeneous Coordinate 에서는 선은 다음과 같이 표현할 수 있음.
•
Homogeneous Coordinate 에서 선은 다음과 같이 표현할 수 있음.
◦
점과 동일하게 3차원으로 표현하지만, 선이라는 명시를 통해 선으로 해석할 수 있음.
◦
특정 선 위의 점 들은 다음과 같이 표현할 수 있음.
▪
재미있게도, 의 각 항에 를 곱해도 식을 만족하며 (선 위에 있으며), 이는 Homogeneous Coordinate 에서도 비슷하게 보았던 특징임. 당연하게도, 3차원 상의 직선 위의 점들은 2차원 Plane 에 project 시켰을 때 동일한 점으로 간다는 사실을 수식으로도 확인할 수 있는 부분임.
◦
특정 선 에 대해 normal vector 은 다음 관계가 성립함.
▪
기존 Euclidean Space 에서의 normal 를 에 대해 projection 시키면 가 normal vector 의 방향임을 알 수 있고, normalize 시키면 됨.
Degree of Freedom (DoF)
•
Independent Variable 의 수
•
일반적으로 3D 벡터는 3DoF 를 가지지만, Homogenous Coordinate 에서는 2DoF 를 가짐.
◦
세 항의 비율이 같은 벡터는 동일한 벡터이기 때문임. (Up-To-Scale)
Cross Product and Skew-Symmetric Matrix
•
일반적인 Cross Product 는 다음과 같음.
•
위 Cross Product 를 Matrix Multiplication 형태로 표현할 수 있음.
◦
Matrix Multiplication 을 사용하면 다른 Matrix 연산과 합치기도 용이하고, 병렬처리 등이 간편함.
•
Skew Symmetrix Matrix 는 를 만족하는 matrix 임. → 앞선 가 Skew Symmetric !
The Line Joining Two Points
•
Homogeneous Coordinate 에서 두 점을 지나는 직선은 다음과 같이 나타낼 수 있음.
◦
이고, 이기 때문에 는 모두 이 실제 3차원 공간에서 표현하는 선 위에 있음을 보일 수 있음.
Intersection of Lines
•
Homogeneous Coordinate 에서 두 선의 교점은 다음과 같이 나타낼 수 있음.
◦
이고, 이기 때문에 는 과 에 동시에 위에 있음을 보일 수 있음.
Intersection of Two Parallel Lines
•
두 직선의 교점은 앞선 설명과 같이 로 계산할 수 있음.
◦
교점이 Ideal Point (Infinity) 에 있음을 확인할 수 있음. (Last element is zero !)
•
신기한 점은, 축에 평행한 직선 는 모두 동일한 점 에서 만난다는 점임.
◦
이기 때문에 해당 점이 해당 선 위에 있음.
◦
마찬가지로, 축에 평행한 직선은 모두 동일한 점 에서 만남.