

Projective Ambiguity of Cameras Given
•
Camera Projection Matrix 가 주어지면 를 유일하게 결정할 수 있음.
◦
하지만 반대로, 가 주어졌을 때 을 유일하게 결정할 수 없음. 이는 각 Camera Projection Matrix 에 Projective Transformation 를 곱해도 동일한 를 얻을 수 있기 때문임.
◦
정성적으로는 에는 World Coordinate → Camera Coordinate 로 변경하는 과정이 포함되어 있고, World Coordinate 를 어떻게 택하느냐에 따라서 같은 를 가지는 Epipolar Geometry System 이라도 다양한 의 조합이 나올 수 있음.
Canonical Forms of Camera Metrices
•
일반성을 잃지 않고 두 Camera Projection Matrix 를 다음과 같이 표현할 수 있음.
•
Fundamental Matrix 는 다음과 같이 표현됨.
◦
이는 다음과 같이 유도할 수 있음.
Skew Symmetric Matrix
•
3D Cross Product 는 다음과 같은 Skew Symmetric Matrix 의 Left Multiplication 으로 변형 가능함.
•
Skew Symmetric Matrix 는 다음과 같이 Block Diagonal Form 으로 표현할 수 있음.
•
Skew Symmetric 은 다음과 같은 특성도 가지고 있음.
1.
If is skew-symmetric
2.
If
•
Canonical Cameras Given : When be a Fundamental Matrix?
•
에 대해 정의된 가 Fundamental Matrix 임은 가 Skew Symmetric 인 것과 동치임.
Canonical Cameras Given : Decomposing into a Camera Pair
•
가 주어졌을 때 두 Camera Projection Matrix 을 위와 같이 decomposition 할 수 있음.
◦
는 임의의 Rank 3 의 Skew Symmetric Matrix 임. → 유효한 을 위한 조건임.
◦
은 을 만족하는 Epipole 임.
•
가 Skew Symmetric 임을 통해 가 Fundamental Matrix 임을 보일 수 있음.
◦
가 Skew Symmetric 이었기 때문에 위 식도 Skew Symmetric 이고 증명할 수 있음.
•
에 대한 안전한 해는 임. 이는 이러한 세팅이 의 Rank 3 가 보장되기 때문임.
Essential Matrix
•
를 알고 있는 Calibrated Case 에서는 특별하게 Coordinate 를 바꿔서 생각해볼 수 있음.
◦
를 Normalized Coordinate 라고 함.
•
Normalized Coordinate 에서는 을 없이 간단하게 다음과 같이 나타낼 수 있음.
•
기존의 Fundamental Matrix 의 constraint 식은 다음과 같이 변형될 수 있음.
◦
새로운 를 위와 같이 정의할 수 있고, Fundamental Matrix 와 의 관계를 가짐.
◦
가 Rank 2 이고, 이 Full Rank 이기 때문에 는 Rank 2 임.
◦
는 가 3DoF, 이 3DoF 인데 Up-to-Scale 이어서 5DoF 를 가짐.
Properties of Essential Matrix
•
Essential Matrix 를 SVD 하면, 다음과 같은 형태가 됨.
◦
이 강의에서 증명은 하지 않음.
Extracting Cameras from Essential Matrix
•
앞선 SVD 의 특징들을 이용하여 로부터 를 추출할 수 있음.
◦
위 식에서 가운데 항을 다음과 같이 Up-to-Scale 을 고려해 decomposition 할 수 있음.
◦
로 변형이 가능함.
▪
가 Skew Symmetric Matrix 의 Block Diagnoal Form 형태임을 통해 로 지정할 수 있음.
▪
가 orthogonality 에 영향을 주지 않음을 통해 전체 가 orthogonal 하고 가 1임을 통해 를 로 지정할 수 있음.
•
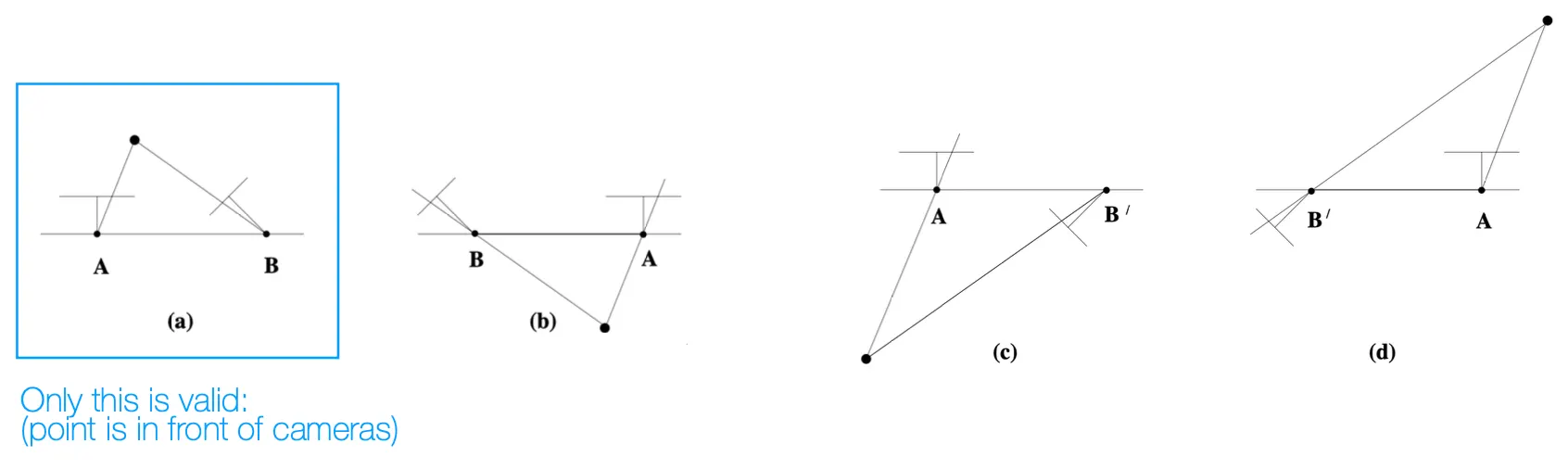
특별한 점은 에서 Camera Parameters 를 얻어내는 경우와는 달리 에서 얻어내는 것은 4 개의 possible solution 이 있어 상대적으로 ambiguity 가 적음.
◦
구해낸 로부터 다시 을 복원할 수 있음.
◦
위 네 가지의 solution 중 아래의 가 가장 적합한 경우임.
Estimating Fundamental Matrix : 8 Points Algorithm
•
을 만족하는 대응점 쌍 를 이용해서 를 역으로 계산해낼 수 있음.
•
는 9 개의 variable 을 가지고 있고 Up-to-Scale 이기 때문에 8 개의 Corresponding Points 를 가지고 있으면 를 specify 할 수 있음. (8 Points Algorithm)
◦
하지만 이렇게 구하면 실제로는 7DoF 인 가 추가적인 constraint 가 없기 때문에 Rank 2 가 아닐 수도 있음.
•
이 문제를 해결하기 위해 Singularity Constraint 를 추가하여 다음과 같은 처리를 할 수 있음.
◦
은 의 가장 작은 singular value 를 0 으로 만든 diagonal matrix 임.
◦
이렇게 계산된 은 조건을 만족하면서 와의 Frobenius Norm 을 최소화하는 값이기도 함.
•
Practical 한 case 에 실제 Corresponding Points 의 좌표가 너무 크거나 분포가 어려우면, noise 가 극대화될 수도 있기에 center origin + RMS distance 등의 방법으로 normalization 을 거친 후에 DLT 로 를 먼저 계산하고 나중에 denormalize 를 함.
Estimating Fundamental Matrix : 7 Points Algorithm
•
8 Points 로 시작하여 Singularity Constraint 를 추가하지 말고, 애초부터 7 Points 만으로 를 계산할 수 있는 방법론 (7DoF 인 를 예측하기 위해 필요한 최소의 Corresponding Points 만을 이용)
•
7 Points 만을 이용해서 의 문제를 해결하면 dimension 이 2 인 Null Space 를 구할 수 있고, 최종적인 해는 다음과 같은 형태로 나타나게 됨.
◦
Null Space 의 basis 가 이고 이것이 나타내는 Fundamental Matrix 가 각각 임.
•
위에서 구한 일반해에 의 constraint 를 사용할 수 있음. (Rank 2 이기 때문임)
◦
에 대한 3차식의 해로 를 구해낼 수 있기 때문에 1개, 혹은 3개의 가능한 해를 얻어낼 수 있음.
Estimating Essential Matrix : 5 Points Algorithm
•
5DoF 인 를 구하기 위해서 5 개의 Corresponding Points 가 필요함.
•
구체적으로는 다루지 않음.